News
May 15, 2026
Distributed Edge Storage Systems in Mathematics
We are pleased to share a new open-access article in Mathematics on proactive high availability for microservice-based distributed edge storage. The paper studies a practical reliability problem for mobile edge computing: storage services must remain available for immersive and IoT workloads while facing both abrupt failures and slower software-aging effects.

What the paper contributes
- Develops a Stochastic Reward Net (SRN) model for a multi-node edge storage architecture with hardware failures, software failures, software aging, high availability, live migration, and rejuvenation.
- Evaluates six policy scenarios and introduces Capacity-Oriented Availability (COA) as the expected number of usable microservices while the storage layer remains operational.
- Runs steady-state and sensitivity analyses over twelve timing parameters to identify which policy and timing choices most affect service availability.
Why this matters
- The Crossref abstract verifies that policies including live migration achieve the highest, or effectively tied-highest, COA across broad failure and repair ranges.
- The paper highlights a subtle operational risk called Proactive Crash (PC): uncoordinated rejuvenation can reduce availability when services are terminated before live migration finishes evacuating them.
- The results give concrete configuration guidance: let migration complete before rejuvenation, and tune rejuvenation intervals so they are neither too frequent nor too sparse.
Publication record: Published online on May 15, 2026 in Mathematics, Volume 14, Issue 10, Article 1704 (DOI, MDPI article).
February 22, 2026
VAE+DDPG for Autonomous Navigation in Low-Light Environments
We are pleased to share a new open-access article in Advanced Intelligent Systems that tackles a practical robotics bottleneck: indoor navigation when ambient light drops and depth sensing becomes unreliable. Instead of treating low-light degradation as only a control problem, the paper redesigns the representation itself so the policy learns from geometry-focused latent features rather than directly from brightness-sensitive observations.

What the paper contributes
- Introduces an attention-enhanced VAE+ encoder that combines Feature Pyramid Network (FPN) structure and CBAM attention to learn illuminance-robust depth features.
- Couples that encoder with Deep Deterministic Policy Gradient (DDPG) and jointly tunes the perception module and control policy instead of freezing the encoder after pretraining.
- Evaluates the method in cluttered Gazebo navigation scenes and unseen-maze transfer tests; the public codebase shows a TurtleBot3-style setup with dual depth cameras and goal-conditioned state inputs.
Why this matters
- Crossref metadata for the published abstract says the learned latent space shifts toward geometric features rather than raw intensity values, which is exactly the right bias when low-light sensing degrades.
- A public abstract summary indexed alongside the DOI reports roughly 88% success at 30 Lx and almost 94% at 300 Lx, while plain DDPG stabilizes near 70% and unseen-maze transfer drops only about 3 points.
- The published abstract also states that deployment processes depth frames at 10 Hz on a single RTX 4070, suggesting the method is practical not only in simulation but also as an affordable indoor autonomy pipeline.
Publication record: Published online on February 22, 2026 in Advanced Intelligent Systems as open access, article e202500636 (DOI, Wiley article, code repository).
December 31, 2025
Availability Modeling for Edge Systems under Correlated Failures
We are pleased to highlight a new publication in the Journal of The Korea Society of Computer and Information that focuses on a realism gap in edge dependability studies: failures in edge environments are often correlated rather than isolated. When power, network, or site-level disruptions strike multiple nodes at once, recovery policies that look effective under independent-failure assumptions can behave very differently in practice.

What the paper contributes
- Extends an SRN-based edge availability model to explicitly represent correlated failures rather than only independent ones.
- Defines a Capacity-Oriented Availability (COA) metric that captures the overhead of High Availability (HA) and Live Migration (LM) policies.
- Uses discrete-event sensitivity analysis to compare recovery behavior across different failure intervals and correlated-failure scales.
Why this matters
- The official KCI abstract reports that the combined HA+LM policy performs better when failure intervals are long.
- The same abstract reports a policy reversal once the number of correlated-failure nodes exceeds 5, because LM node-search overhead slows recovery during larger incidents.
- This turns the paper into practical guidance for adaptive recovery design in edge platforms rather than a fixed-policy recommendation.
Publication record: Published on December 31, 2025 in Journal of The Korea Society of Computer and Information, 30(12), 25-35 (DOI, KCI article).
December 5, 2025
S-iNAS: Performance-Centric Scaling for Ceph-Based Industrial Storage
We are pleased to share the publication of S-iNAS in the Journal of Network and Systems Management. The paper addresses a systems problem that matters directly to Industry 4.0 and digital twin deployments: how to keep Ceph-based industrial network-attached storage responsive when data streams become bursty, highly concurrent, and operationally uneven.

What the paper contributes
- Introduces an SRN-based modeling framework that captures concurrent read and write workflows, replication overhead, and dynamic scaling triggers for Ceph Object Storage Daemons (OSDs).
- Compares two scaling policies head-to-head: scheduled time-based expansion and event-based expansion driven by workload thresholds.
- Studies the effect of arrival rate, client concurrency, VM instantiation delay, and read/write composition on throughput and latency.
Why this matters
- The Springer abstract shows that time-based scaling stays stable under moderate load but can react too slowly when demand spikes abruptly.
- Event-based scaling adapts faster and helps reduce latency, though it may cause more frequent reconfigurations.
- The paper turns these trade-offs into actionable guidance for tuning storage services in industrial workflows and digital twin ecosystems.
Publication record: Published online on December 5, 2025 in Journal of Network and Systems Management, Volume 34, Article 34 (DOI, Springer article).
November 1, 2025
Energy-Aware Kubernetes Autoscaling for Microservices
Our recent article in the Journal of Network and Computer Applications studies Kubernetes autoscaling from a more useful engineering perspective: not only whether a deployment stays responsive, but whether it does so without wasting electrical power. This is especially important for cloud and edge platforms that must balance service quality, infrastructure cost, and sustainability at the same time.

What the paper contributes
- Builds a Generalized Stochastic Petri Net (GSPN) model for Kubernetes-orchestrated microservices that jointly represents Horizontal Pod Autoscaling (HPA), Cluster Autoscaling (CA), application behavior, and infrastructure capacity.
- Introduces the Energy-Response Time Weighted Product (ERWP) metric to evaluate performance and energy efficiency together rather than in isolation.
- Uses sensitivity analysis and realistic case studies to reveal which autoscaling parameters most strongly influence energy use, throughput, and response time.
Why this matters
- The publisher abstract reports that higher autoscaling thresholds under low workloads can reduce electrical consumption by about 32% without materially hurting performance.
- Under high arrival-rate conditions, the same choice can still cut consumption by about 37%, but at the cost of a 175% increase in response time.
- The result is a concrete workload-aware guide for tuning Kubernetes deployments instead of relying on heuristic trial and error.
Publication record: Published in November 2025 in Journal of Network and Computer Applications, Volume 243, Article 104287 (DOI, ScienceDirect article).
October 14, 2025
Maintenance-Centered Dependability for Urban Surveillance
This Computing article reframes smart-city surveillance as a maintenance problem as much as a sensing or analytics problem. Urban surveillance platforms may include cameras, edge resources, communication links, and repair workflows, and their dependability depends heavily on how failures are anticipated, prioritized, and handled over time.

What the paper contributes
- Uses Stochastic Petri Net (SPN) models to compare reactive, autonomous, and preventive maintenance strategies in an edge-enabled surveillance environment.
- Integrates availability and reliability analysis into a unified maintenance-evaluation framework.
- Applies sensitivity analysis to identify which components matter most for system availability and therefore deserve the greatest maintenance focus.
Why this matters
- The Springer abstract emphasizes that maintenance strategy has a direct effect on the dependability and efficiency of urban surveillance systems.
- It also highlights sensitivity analysis as the key mechanism for identifying high-impact components instead of spreading maintenance effort evenly.
- For smart-city operators, that means maintenance planning can be made more targeted, more resilient, and more cost-effective.
Publication record: Published on October 14, 2025 in Computing, Volume 107, Article 208 (DOI, Springer article).
September 1, 2025
RT-VLM: Re-Thinking Vision-Language Robustness for Real-World Recognition
We are also excited to share RT-VLM, a new arXiv preprint focused on one of the most persistent problems in real-world perception: domain shift. When image statistics, viewing angles, occlusion patterns, or neighboring object classes change, recognition performance often drops sharply. RT-VLM tackles that problem by combining structured multimodal evidence with an explicit self-correction loop.

What the paper contributes
- Introduces a synthetic dataset generation pipeline annotated with four structured clues: bounding boxes, class names, object-level captions, and a scene-level context caption.
- Uses parameter-efficient supervised tuning of Llama 3.2 11B Vision Instruct on that multimodal supervision.
- Applies a two-stage inference process in which the model first generates its own clues and then re-examines them as evidence to iteratively correct the final recognition result.
Why this matters
- The arXiv abstract frames RT-VLM around four important sources of robustness failure: low-level image variation, pose and viewpoint change, partial occlusion, and confusion among nearby classes.
- The reported gains across robustness benchmarks suggest that structured evidence plus self-critique is a promising direction for more reliable real-world visual perception.
- This is particularly relevant for embodied AI, robotics, and safety-critical recognition settings where robustness matters more than single-dataset accuracy.
Publication record: Posted on September 1, 2025 as an arXiv preprint (arXiv abstract, DOI).
August 27, 2025
Aging Dependability for AAM Vehicle Digital Twins
This MetaCom 2025 short paper expands digital-twin evaluation beyond realism and integration into the question of long-running dependability. For advanced air mobility (AAM) platforms, a cloud-edge-in-the-loop simulation stack is only useful if it can stay dependable while synchronizing models, services, and data flows over time.

What the paper contributes
- Studies a cloud-edge-in-the-loop platform for an AAM vehicle digital twin rather than an isolated simulator component.
- Frames the core research problem around aging dependability, which is especially important for persistent, always-on metaverse and digital-twin systems.
- Positions dependability evaluation as part of digital-twin architecture design for aviation-oriented experimentation.
Why this matters
- The official MetaCom record verifies the work as a 2025 short paper on metaverse cloud-edge computing for vehicle digital twins.
- This perspective is important because operational twin platforms degrade under sustained service time, not only under single-shot test conditions.
- It strengthens the bridge between digital-twin fidelity and trustworthy long-duration experimentation for AAM.
Publication record: Published on August 27, 2025 in the Proceedings of the 2025 International Conference on Metaverse Computing, Networking and Applications (MetaCom) (DOI, accepted papers).
August 27, 2025
High-Availability Quantification for Metaverse Storage Backbones
Persistent metaverse environments depend on storage systems that keep state available across distributed services and users. This MetaCom 2025 paper brings formal availability modeling directly into that layer, asking how resilience in distributed storage should be quantified rather than assumed.
What the paper contributes
- Uses Stochastic Reward Nets to quantify high availability in metaverse-oriented distributed storage.
- Places storage dependability inside the architectural core of immersive systems instead of treating it as a backend afterthought.
- Extends the broader dependability modeling line into storage infrastructures designed for persistent virtual environments.
Why this matters
- The official MetaCom program lists the paper in Conference Session 1: Metaverse Computing, Architectures, and Applications.
- That placement reflects the architectural significance of storage availability for immersive services, digital assets, and synchronized state.
- The result is a stronger basis for reasoning about resilience in metaverse infrastructures before deployment.
Publication record: Published on August 27, 2025 in the Proceedings of the 2025 International Conference on Metaverse Computing, Networking and Applications (MetaCom) (DOI, MetaCom program).
August 27, 2025
Sim-to-Real Reinforcement Learning with ROS2 and Unreal Engine
This MetaCom 2025 workshop paper focuses on one of robotics’ most practical bottlenecks: how to make virtual training transfer into physical behavior. By combining ROS2, Unreal Engine, and reinforcement learning for TurtleBot experimentation, the work treats metaverse-ready simulation as a deployment bridge rather than only a visualization environment.

What the paper contributes
- Couples a ROS2 + Unreal Engine stack with reinforcement learning for TurtleBot-based sim-to-real experimentation.
- Treats the metaverse as a controllable training and evaluation environment for robot behavior transfer.
- Connects virtual-world experimentation with physical navigation deployment in a concrete robotics workflow.
Why this matters
- The official MetaCom program lists the paper in Workshop Session 1, confirming its role in testbed-oriented metaverse research.
- Sim-to-real transfer remains a central barrier in robotic learning systems, especially when moving from controlled simulation to messy physical environments.
- This paper makes the metaverse framing operational by tying it directly to deployable robot-control practice.
Publication record: Published on August 27, 2025 in the Proceedings of the 2025 International Conference on Metaverse Computing, Networking and Applications (MetaCom) (DOI, MetaCom program).
August 27, 2025
LLM-Based Malicious Code Detection for Metaverse Security
As metaverse platforms become more programmable, security questions move closer to code generation, code review, and automated filtering pipelines. This MetaCom 2025 paper addresses that direction by studying malicious code detection with large language models and by treating token optimization as part of the detection design space.
What the paper contributes
- Frames malicious code detection as an LLM-based security analysis task.
- Uses token optimization as the main lever for improving code-oriented model behavior.
- Places code-security tooling squarely inside metaverse security research rather than outside it.
Why this matters
- The official MetaCom program places the paper in Conference Session 4: Security, Privacy, and Trust.
- That positioning shows the work is not only about language models, but about securing programmable metaverse ecosystems.
- The paper therefore points toward a practical developer-security workflow for safer code handling in immersive platforms.
Publication record: Published on August 27, 2025 in the Proceedings of the 2025 International Conference on Metaverse Computing, Networking and Applications (MetaCom) (DOI, MetaCom program).
August 27, 2025
Iterative Prompt Optimization for Diverse Metaverse Tasks
This workshop paper treats prompting not as a one-off instruction-writing trick, but as an adaptive optimization problem. In metaverse applications where tasks can vary widely across content generation, interaction, assistance, and moderation, that shift matters because prompt quality becomes part of system performance.
What the paper contributes
- Proposes an iterative prompt optimization framework for improving LLM performance across diverse tasks.
- Reframes prompts as adaptive artifacts that can be refined through repeated feedback rather than fixed text strings.
- Extends LLM performance engineering into metaverse application workflows.
Why this matters
- The MetaCom program confirms the work as part of Workshop Session 1, where experimental and framework-oriented systems were presented.
- In practice, metaverse tasks are heterogeneous, so prompt behavior often needs to be tuned across contexts instead of reused unchanged.
- This makes the paper especially relevant for robust, reusable LLM tooling in interactive virtual environments.
Publication record: Published on August 27, 2025 in the Proceedings of the 2025 International Conference on Metaverse Computing, Networking and Applications (MetaCom) (DOI, MetaCom program).
August 27, 2025
PGELU for Stable and Scalable Metaverse Perception
This MetaCom 2025 paper introduces PGELU, a parametric GELU variant designed for recognition workloads that span both emotional signals and 3D object understanding. That combination is notable because metaverse perception often mixes human-centered and scene-centered recognition tasks in the same pipeline.

What the paper contributes
- Proposes a parametric GELU formulation for metaverse-driven deep learning.
- Targets the stability and scalability of recognition pipelines for emotion analysis and 3D object recognition.
- Highlights activation design itself as a useful lever in metaverse perception systems.
Why this matters
- The official MetaCom program places the paper in Conference Session 2: AI for the Metaverse.
- That context underscores the paper’s relevance to practical AI architectures in immersive environments.
- The work is therefore meaningful not only as a new activation variant, but as a systems-oriented attempt to stabilize mixed perception workloads.
Publication record: Published on August 27, 2025 in the Proceedings of the 2025 International Conference on Metaverse Computing, Networking and Applications (MetaCom) (DOI, MetaCom program).
August 1, 2025
Queueing-Theoretic Performance Design for Cloud-Edge-Sensor Data Harvesting
Published in ICT Express, this paper studies how cloud-edge-sensor infrastructures can be sized and tuned for data harvesting systems, with agricultural monitoring as a motivating application. Rather than treating sensing pipelines as black boxes, the work uses queueing theory to expose where latency, overload, and under-provisioning emerge before costly infrastructure changes are made.

What the paper contributes
- Models a Cloud-Edge-sensors architecture using M/M/c/K queueing theory to evaluate data-handling performance in sensing systems.
- Analyzes how configuration choices affect efficiency, scalability, and real-time data handling.
- Provides a predictive framework for identifying bottlenecks and adjusting parameters without immediately resorting to expensive structural overbuild.
Why this matters
- According to the ScienceDirect abstract, the model achieved more than 90% utilization in both the cloud and edge layers while still serving as a useful planning instrument.
- The paper is positioned around precision agriculture, where real-time sensing quality directly affects downstream decisions.
- At the same time, the abstract notes that the framework is versatile enough to inform broader IoT scenarios that need efficient real-time analysis and resource management.
Publication record: Published in August 2025 in ICT Express, Volume 11, Issue 4, Pages 597-602 (DOI, ScienceDirect article).
May 19, 2025
Smart Building Surveillance with Edge-Fog Capacity Planning
Another recent publication appeared in the SBRC 2025 proceedings and focuses on intelligent camera surveillance in smart buildings. The core challenge is straightforward but operationally demanding: real-time video analytics requires significant compute resources, and poorly planned edge-fog pipelines can quickly become overloaded, slow, or wasteful.

What the paper contributes
- Uses Stochastic Petri Net (SPN) models to evaluate mean response time, throughput, resource utilization, and drop probability in intelligent surveillance infrastructures.
- Shows how edge and fog resource allocation decisions influence service quality under different message arrival rates.
- Offers planning guidance for scaling video analytics infrastructure in a controlled and explainable way.
Why this matters
- Crossref metadata for the paper reports that increasing the Fog layer to 10 processing cores reduces drop probability to around 35% at an arrival rate of 47.37 msg/ms.
- The same abstract reports that mean response time stays below 10 ms at moderate arrival rates up to about 29 msg/ms.
- The official SBRC 2025 proceedings page notes that 74 full papers were accepted from 203 submissions, corresponding to a 36.5% acceptance rate, underlining the competitiveness of the venue.
Publication record: Published on May 19, 2025 in the Anais do XLIII Simposio Brasileiro de Redes de Computadores e Sistemas Distribuidos (SBRC 2025) (DOI, proceedings article, SBRC 2025 proceedings).
April 2, 2025
Vehicle Digital Twin Integration under Steady Wind Conditions
This proceedings paper from the Korean Society for Aeronautical and Space Sciences focuses on a vehicle digital twin as an integrated engineering system rather than a visualization layer. The study reports preliminary flight-simulation behavior for an eVTOL platform under steady-wind conditions, linking digital-twin design to actual flight-dynamics response.

What the paper contributes
- Integrates the subsystems of a vehicle digital twin and reports preliminary flight-simulation results.
- Studies the KADA KP2-c eVTOL in CTOL mode under light (10 knots) and moderate (20 knots) steady wind.
- Tracks how yaw-rate response changes under wind loading as part of the twin’s dynamic behavior.
Why this matters
- The official KSAS proceedings state that yaw-rate response varies significantly between 2.5 and 1.5 rad/s under the tested wind conditions.
- The same proceedings record positions the twin around high-fidelity dynamics and control response rather than immersive visualization alone.
- This makes the study a solid engineering step toward validating flight-oriented twins with future flight-test data.
Publication record: Published on April 2, 2025 in the Proceedings of the Korean Society for Aeronautical & Space Sciences Spring Conference 2025, Pages 381-382 (KSAS proceedings, DBpia record).
March 13, 2025
Correction Notice for the Container Migration Study
This publication record marks the formal correction linked to the container migration article published earlier in 2025. While shorter than a research paper, it still matters because dependable scholarship also depends on maintaining an accurate and transparent publication trail.

What the paper contributes
- Establishes the official correction entry connected to the original container migration article.
- Keeps the corrected version and the original publication record explicitly linked.
- Preserves downstream citation clarity and metadata consistency.
Why this matters
- The Springer correction record is part of the scholarly history of the article and should remain visible as such.
- Accurate change tracking is especially important for technical papers that may be reused in later comparative or modeling studies.
- This entry therefore supports the integrity of the broader research line, even though it is not a new experimental study by itself.
Publication record: Published on March 13, 2025 in Computing, Volume 107, Article 93 (DOI, original article).
February 5, 2025
Comparative Performance Modeling for Container Migration
Container migration is one of the key mechanisms that allows cloud and edge services to remain available while workloads move, fail over, or rebalance. This Computing article studies that problem systematically using stochastic Petri net models instead of relying only on ad hoc operational trial and error.
What the paper contributes
- Proposes two SPN models, one with an absorbing state and one without, to evaluate container migration performance.
- Compares Cold, PreCopy, PostCopy, and Hybrid migration strategies under realistic demand and capacity assumptions.
- Analyzes metrics including total migration time, migration rate, utilization, and discard probability, with additional sensitivity analysis for the Hybrid policy.
Why this matters
- The Springer abstract reports that the Cold strategy achieves lower total migration time under higher migration-arrival pressure.
- The same abstract reports that PostCopy produces the lowest discard probability in high-demand scenarios.
- The paper therefore offers operators a structured way to choose migration policy based on workload conditions rather than intuition alone.
Publication record: Published on February 5, 2025 in Computing, Volume 107, Article 64 (DOI, Springer article).
February 1, 2025
Transactional Dynamics in Hyperledger Fabric
We are pleased to highlight a new ICT Express publication on permissioned blockchain performance. The paper models transaction processing in Hyperledger Fabric using Stochastic Petri Nets, with the goal of helping administrators understand how configuration choices affect response time, throughput, and resource efficiency before deployment decisions become expensive.
What the paper contributes
- Develops an SPN-based transaction-flow model for permissioned Hyperledger Fabric environments.
- Uses sensitivity analysis to identify the configuration factors that most strongly affect mean response time and throughput.
- Validates the model against system behavior and provides a pre-deployment tool for more disciplined performance planning.
Why this matters
- The ScienceDirect abstract reports a 95% confidence interval for response-time analysis using the proposed model.
- Case studies show that block size can change throughput and response time by as much as 200%, making configuration discipline essential.
- This turns the paper into a practical operations guide for enterprise blockchain administrators rather than a purely theoretical analysis.
Publication record: Published in February 2025 in ICT Express, Volume 11, Issue 1, Pages 87-92 (DOI, ScienceDirect article).
February 1, 2025
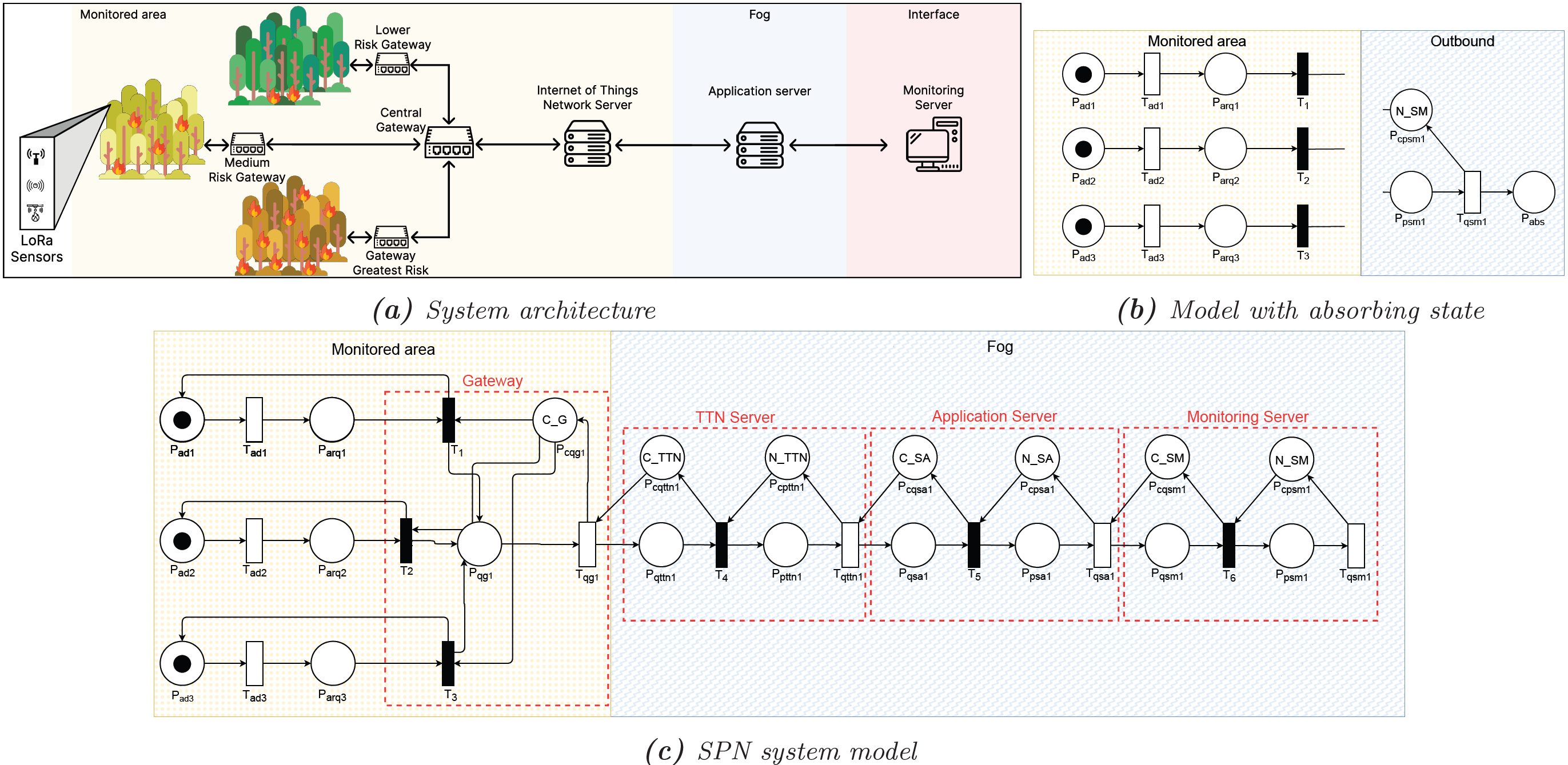
Multi-Region IoT Disaster Detection with Stochastic Modeling
This ICT Express publication studies disaster detection as a geographically distributed systems problem rather than a single-site sensing setup. By combining LoRaWAN-oriented communication assumptions with cloud and fog resources, the paper examines how multi-region monitoring can be modeled before infrastructure is deployed at scale.

What the paper contributes
- Presents stochastic models for IoT disaster detection across multiple geographic areas using LoRaWAN, fog, and cloud resources.
- Uses Stochastic Petri Nets to analyze key performance indicators such as average response time and utilization.
- Positions the models as a planning tool for cost-efficient server and processing-capacity design.
Why this matters
- The ScienceDirect highlights report that additional processing cores reduce mean response time and improve throughput.
- The abstract also frames the work around financial and technical barriers to building cost-effective automated systems in high-risk and secluded areas.
- This makes the paper directly relevant to resilient disaster-monitoring infrastructure, especially when coverage must extend beyond a single location.
Publication record: Published in February 2025 in ICT Express, Volume 11, Issue 1, Pages 34-40 (DOI, ScienceDirect article).
January 21, 2025
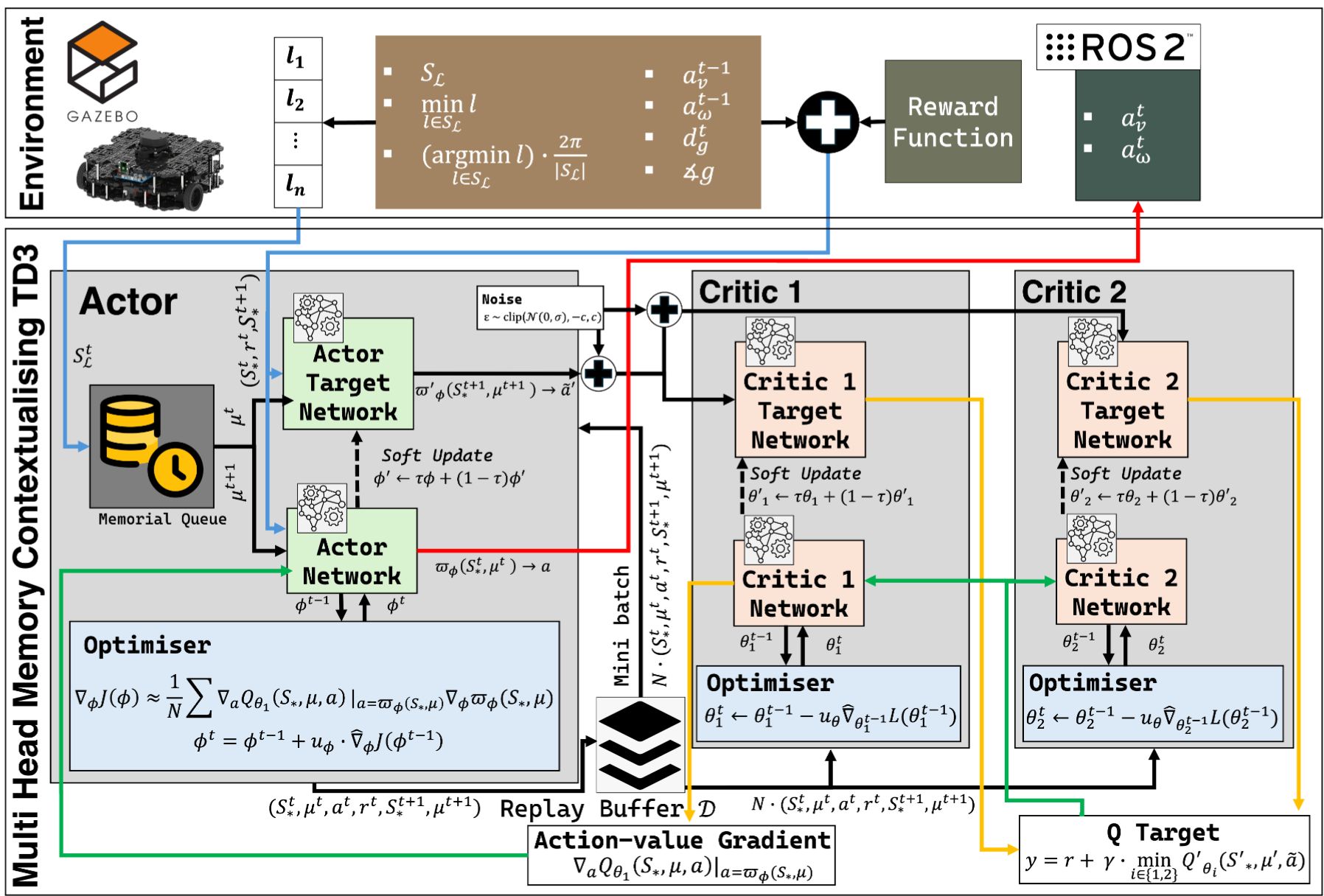
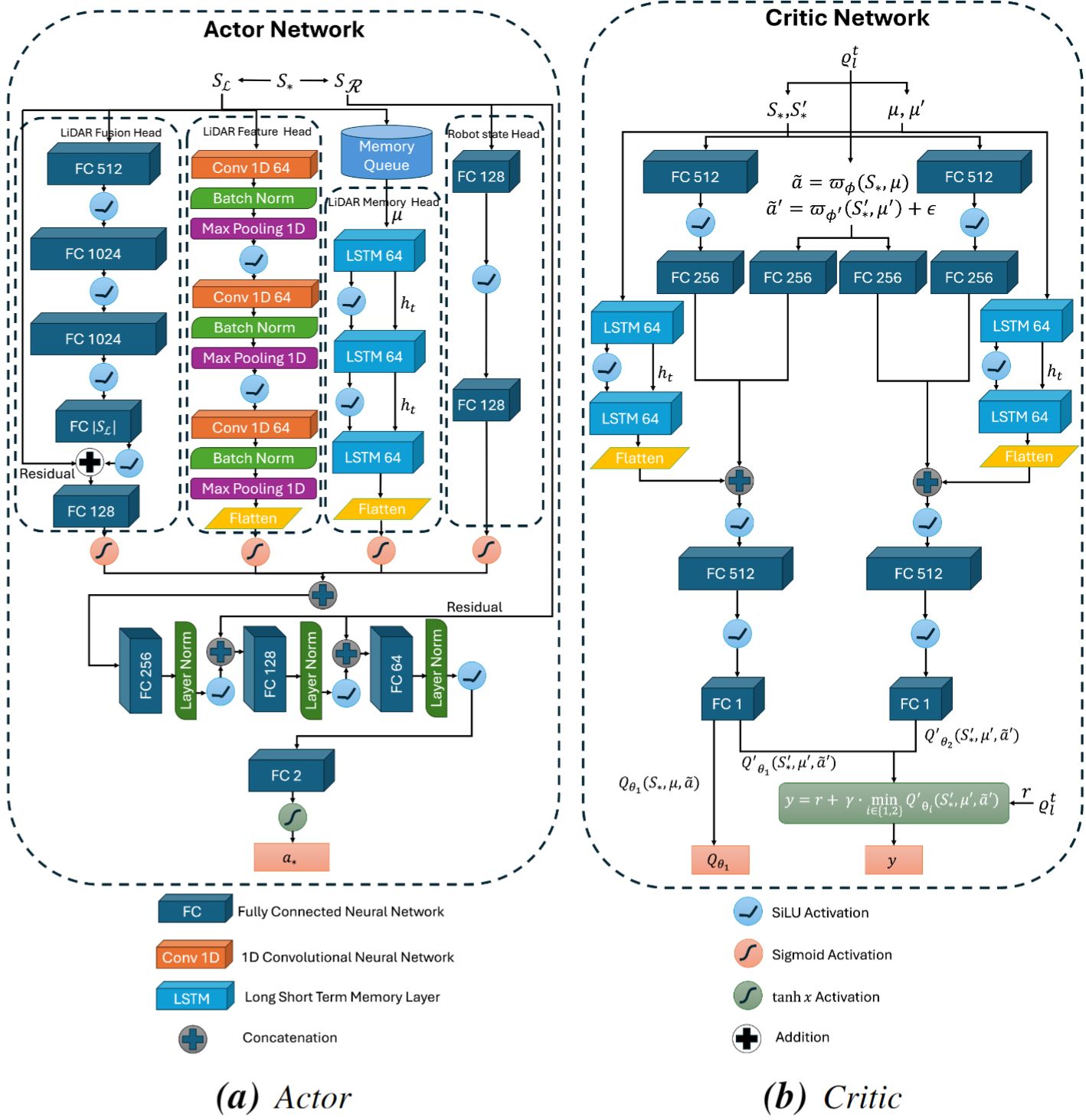
mhmcTD3: Multi-Head DRL with Memory for End-to-End Navigation
This TechRxiv preprint presents mhmcTD3, a multi-head actor-critic reinforcement learning architecture for autonomous navigation in dynamic and cluttered environments. The work is especially compelling because it aims to preserve rich LiDAR information, temporal context, and real-world transferability at the same time instead of optimizing only one of those dimensions.
What the paper contributes
- Introduces the Multi-Head Memory Contextualising TD3 (mhmcTD3) architecture with specialized heads for LiDAR fusion, LiDAR features, robot states, and LiDAR memory.
- Combines tailored LiDAR preprocessing, CNN-based feature extraction, an LSTM-based memory head, and the use of SiLU and CoRE for more stable learning.
- Evaluates the framework in ROS2/Gazebo simulation and on a Turtlebot3 waffle pi platform across multiple LiDAR resolutions.
Why this matters
- The official TechRxiv PDF reports strong performance in dense and fast-changing environments, including better handling of small dynamic obstacles.
- The same preprint emphasizes that ablation studies confirm the importance of each head, showing that the architecture is not just larger, but meaningfully modular.
- This makes mhmcTD3 a strong sim-to-real navigation contribution for robotics settings where map-free adaptability matters.
Publication record: Posted on January 21, 2025 on TechRxiv (DOI).
December 12, 2024
Edge-Fog-Cloud Industrial Automation Performance Evaluation
This Journal of Network and Systems Management article studies industrial automation as a tiered cyber-physical system rather than a single compute placement problem. The work compares edge, fog, and cloud architectures so that latency, throughput, and resource behavior can be evaluated before a factory workflow is deployed at scale.

What the paper contributes
- Frames industrial IoT automation as a layered edge-fog-cloud design problem with measurable performance consequences.
- Uses model-driven evaluation to compare how architecture choices affect service behavior in automation pipelines.
- Gives system designers a clearer basis for placing computation close to machines, near local fog resources, or in the cloud.
Why this matters
- Industrial automation workloads are sensitive to both timing and reliability, so placement decisions cannot be treated as only a cost question.
- The paper makes edge/fog/cloud trade-offs visible in a way that supports capacity planning for Industry 4.0 deployments.
- It also extends the website’s News coverage for late-2024 IoT and CPS publications.
Publication record: Published online on December 12, 2024 in Journal of Network and Systems Management, Volume 33, Article 15 (DOI, Springer article).
December 8, 2024
Resilient and Efficient Microservices at GLOBECOM 2024
This IEEE GLOBECOM 2024 paper focuses on a hard operational balance: microservice platforms should recover quickly, but the recovery strategy must not waste energy or over-provision the infrastructure. The study uses stochastic modeling to connect recovery time and energy consumption within a single evaluation lens.
What the paper contributes
- Quantifies energy consumption and recovery-time behavior in resilient microservice architectures.
- Uses stochastic models to move beyond informal resilience claims and compare recovery choices quantitatively.
- Connects service-continuity goals with efficiency goals, which are often tuned separately in cloud systems.
Why this matters
- Cloud resilience mechanisms can become expensive if recovery policies keep too many resources active for too long.
- Energy-aware modeling helps operators reason about sustainability without weakening recovery objectives.
- The work fills a late-2024 gap between the News page’s Kubernetes and disaster-survivability publication threads.
Publication record: Published on December 8, 2024 in GLOBECOM 2024 - 2024 IEEE Global Communications Conference (DOI, IEEE Xplore record).
November 13, 2024
Multi-Fidelity Data Fusion for Real-Time Aerodynamic Modeling
This KSAS Fall Conference paper addresses a key aerospace modeling problem: flight data arrive from sources with different fidelity, sampling conditions, and uncertainty. A real-time aerodynamic model has to fuse those signals into a usable representation quickly enough to support analysis, validation, and control-oriented workflows.

What the paper contributes
- Presents a multi-fidelity data-fusion method for real-time aerodynamic modeling from flight data.
- Positions aerodynamic model generation as a data-integration problem rather than a single-source fitting task.
- Supports the broader aerospace systems line on flight dynamics, validation, and digital-model generation.
Why this matters
- Real-time aerodynamic models are useful only when they can reconcile measurement quality, model fidelity, and operational speed.
- Multi-fidelity fusion helps bridge the gap between simulation, low-fidelity estimates, and flight-test evidence.
- The post adds the missing November 2024 aerospace publication milestone to the News chronology.
Publication record: Presented on November 13, 2024 in the Proceedings of the Korean Society for Aeronautical & Space Sciences Fall Conference 2024 (KSAS program record).
October 16, 2024
AAM Vehicle Digital Twin with ePropulsion and Software Integration
This Aerospace Systems Engineering Society Fall Conference paper continues the AAM vehicle digital twin line by emphasizing integration strategy. Instead of treating propulsion, software, simulation, and certification artifacts as separate pieces, the work frames them as a coordinated virtual-certification workflow.
What the paper contributes
- Describes an AAM vehicle digital twin strategy connecting advanced ePropulsion and software integration.
- Supports virtual certification by organizing simulation, implementation, and validation concerns in one twin-centered workflow.
- Extends the AAM-VDT research direction from platform concept toward integration practice.
Why this matters
- Advanced air mobility systems need credible virtual-certification pipelines before flight-test campaigns can scale safely.
- Integration strategy is as important as simulation fidelity because propulsion, software, and validation data must stay aligned.
- This post fills the October 2024 digital-twin publication gap in the News timeline.
Publication record: Published on October 16, 2024 in the Proceedings of the Aerospace Systems Engineering Society Fall Conference 2024, pages 719-722 (DBpia record).
October 4, 2024
ULoRA for Universal Low-Rank Adaptation
The ULoRA OpenReview submission explores a practical question in modern deep learning: can low-rank adaptation be made more universal across diverse model architectures instead of being tuned narrowly for one network family? The work sits at the intersection of efficient fine-tuning, architectural transfer, and reusable adaptation modules.

What the paper contributes
- Frames low-rank adaptation as a cross-architecture problem rather than only a task-specific fine-tuning trick.
- Studies how adapter-style modules can support diverse deep learning models under one adaptation principle.
- Adds an efficient learning systems thread to the News page’s AI and autonomy coverage.
Why this matters
- Parameter-efficient adaptation is important when models are too large to retrain for every downstream setting.
- A universal adaptation view can reduce engineering fragmentation across vision, language, and control workflows.
- The post records the October 2024 OpenReview submission in the publication chronology while clearly treating it as a submission record.
Publication record: Posted on October 4, 2024 as an ICLR 2025 Conference withdrawn submission on OpenReview (OpenReview record).
August 28, 2024
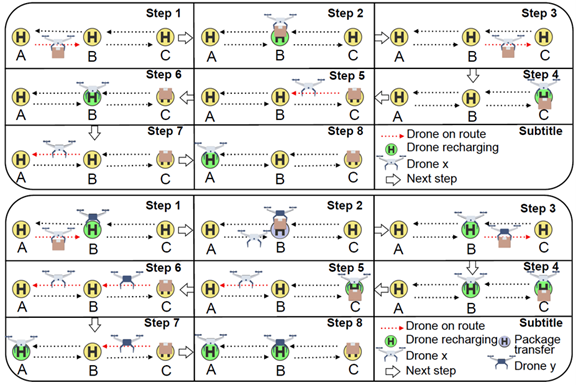
Efficient UAV Flights and Operational Performance in Delivery Services
This IEEE Access article examines UAV delivery as a battery-aware logistics system rather than a simple point-to-point flight problem. The study compares solo flights and cooperative package-transfer strategies through stochastic models, making it possible to reason about delivery time, charging policy, fleet coordination, and operational performance together.

What the paper contributes
- Develops stochastic models for UAV delivery operations with and without package transfer between drones.
- Studies how charging time, charging-station placement, fleet size, and package handoff influence end-to-end delivery performance.
- Provides a quantitative basis for comparing individual UAV missions against cooperative logistics strategies.
Why this matters
- Drone delivery depends on energy constraints as much as path planning, so battery and charging assumptions must be visible in the model.
- Cooperative package transfer can reduce operational friction when one drone should not be forced to complete an entire delivery alone.
- The result is useful for logistics planning because route efficiency, battery limits, and cooperative operations are evaluated together.
Publication record: Published in IEEE Access, Volume 12, Pages 144544-144564 (DOI, IEEE Xplore).
July 29, 2024
SHANGUS: Redefining Autonomous Exploration with Deep Reinforcement Learning
This arXiv preprint presents SHANGUS / FH-DRL, a framework that connects frontier heuristics with deep reinforcement learning for faster autonomous exploration in unknown environments. The key idea is to let heuristic frontier selection guide where the robot should explore while DRL handles robust navigation through cluttered, dynamic space.

What the paper contributes
- Combines the adaptability of deep reinforcement learning with exponential-hyperbolic frontier heuristics for autonomous exploration.
- Separates frontier selection from DRL navigation, giving the system a clearer division between exploration strategy and local movement.
- Evaluates the approach in ROS2 and Gazebo environments against traditional baselines such as Nearest Frontier, CFE, and GDAE.
Why this matters
- Exploration robots need to move quickly without wasting travel distance or getting trapped by local clutter.
- Hybridizing heuristic frontier selection with DRL makes the method easier to interpret than a fully opaque policy while still preserving adaptive navigation.
- The framework has natural applications in industrial automation, autonomous driving, household robotics, and space-oriented exploration tasks.
Watch Our Demos
- Simple World: Watch the demo
- Moderate Complex World: Watch the demo
- Most Complex World: Watch the demo
Publication record: Posted as FH-DRL: Exponential-Hyperbolic Frontier Heuristics with DRL for accelerated Exploration in Unknown Environments on arXiv (arXiv abstract, DOI).
July 20, 2024
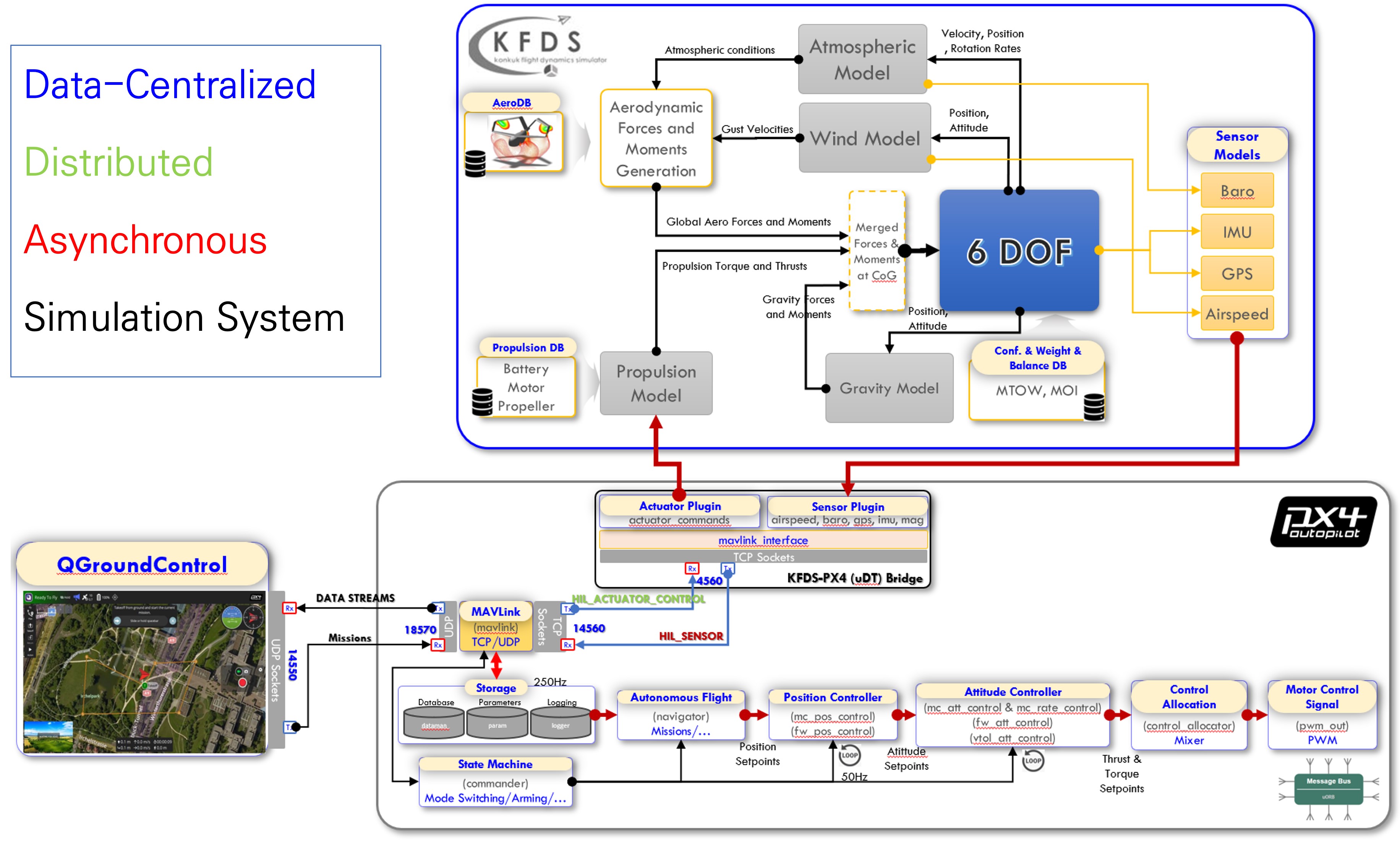
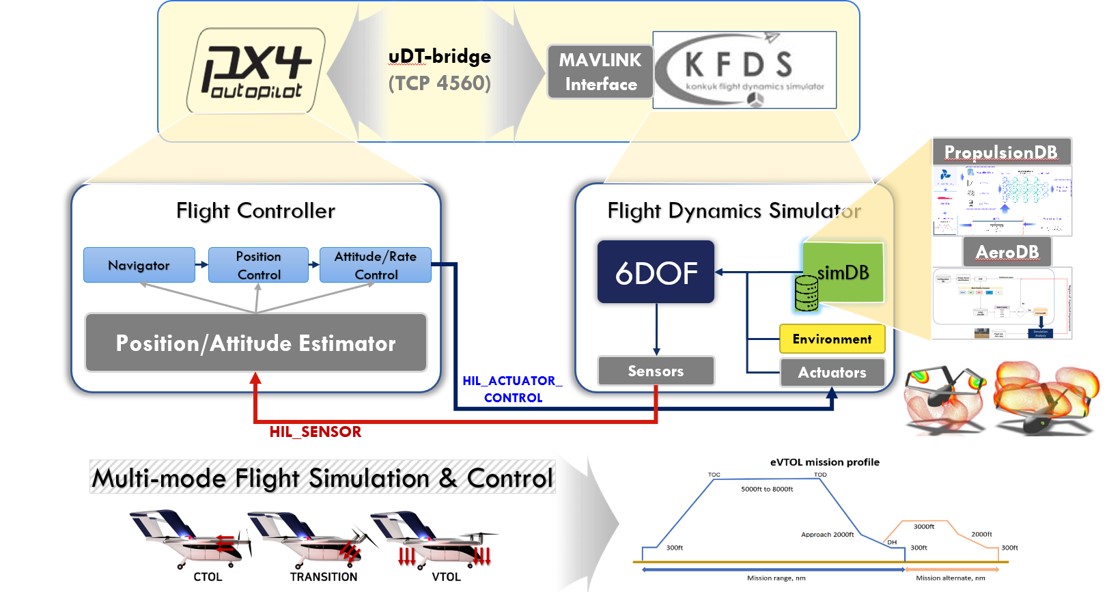
Pilot-in-the-loop simulation with virtual reality (PILS-VR) running on top of cloud-in-the-loop simulation (CILS)
I am excited to share the progress our team has made in a short period. It was an honor to represent our group at the Conference on Automation, Control, and Robotics Engineering (CACRE 2024) in Jeju. Our collaboration with Korean students, combined with the relentless efforts of our Vietnamese team at KADA, has led to remarkable developments.
In a short time, we have successfully expanded our Pilot-in-the-Loop Simulation (PILS) system by integrating it with Virtual Reality (VR) on the Cloud-in-the-Loop Simulation (CILS) platform. A special thanks to my colleagues: Dr. Vinh Vinh Phạm, Nghĩa, and Nguyễn Viết Nghĩa. Please excuse the rudimentary graphics as our focus wasn’t on 3D development.
PILS-VR System Overview
In this video, we showcase our innovative system developed at the Konkuk Aerospace Design Airworthiness Institute (KADA). We’ve successfully integrated PILS with our Cloud-in-the-Loop Simulation (CILS) system, built on the KP-2 platform for Future Advanced Air Mobility (AAM).
Highlights of PILS-VR:
- Realistic VR Training: Experience a highly immersive training environment that simulates real-world flight conditions and emergency scenarios.
- Cloud-Based Flexibility: Seamless integration with CILS enables remote access, real-time data analysis, and collaborative training, enhancing flexibility and efficiency.
- Cost-Effective Solutions: Reduce traditional training costs and increase accessibility with our advanced VR and cloud technologies.
- Personalized Feedback: Benefit from detailed performance tracking and tailored feedback to accelerate learning and improve skills.
Join us to see how PILS-VR is revolutionizing pilot training and setting new standards in aviation safety.
Data Exchange Method Development
Using this method, we can input control signal data from pre-existing files into KFDS, which then loads these control data according to the predetermined times specified in the files. Subsequently, the flight state data generated by KFDS are recorded for validation or virtual certification purposes.
(p/d) Twin Data Center
Watch our video on Twin Data Center
All data from KFDS and PX4 are collected in run-time simulation for further analysis and prediction for future updates of digital twin models in the virtual world.
July 20, 2024
2024 9th International Conference on Automation, Control and Robotics Engineering (CACRE 2024)
I am thrilled to share that I had the incredible opportunity to attend and present at the 2024 International Conference on Automation, Control, and Robotics Engineering (CACRE 2024) held on Jeju Island, South Korea, from July 18-20, 2024. This prestigious conference brought together leading experts, researchers, and practitioners in the fields of automation, control, and robotics from around the world.
As part of the conference, I presented our latest research from the Konkuk Aerospace Design-Airworthiness Institute (KADA). Our study, titled “AAM-VDT: Vehicle Digital Twin for Tele-Operations in Advanced Air Mobility,” delves into the innovative use of digital twin technology for enhancing tele-operations in the realm of advanced air mobility.
I am honored to share that our presentation received the Excellent Oral Presentation award in the Special Session IX: Modeling, Control, and AI for Autonomous Vehicles. This session was chaired by Sungjin Cho from Sunchon National University, South Korea, with Sangho Kim from Konkuk University, South Korea, serving as Vice Session Chair.
I am incredibly grateful to my professor and co-author, Professor Jae-Woo Lee, the Director of KADA, and all the contributors for their hard work and dedication to this project. A special thank you to the conference organizers and attendees for providing such a fantastic platform to share our work and engage with the global community.
Looking forward to the future collaborations and advancements in this exciting field!


June 17, 2024
Disaster-Survivable Cloud Microservices with Energy-Aware Consolidation
This Computing article studies cloud microservices under disaster-survivability constraints. The central question is not simply whether a service can recover, but how consolidation and dynamic response strategies affect energy use, recovery behavior, and infrastructure efficiency during stressed operating conditions.
What the paper contributes
- Evaluates dynamic response and consolidation strategies for cloud microservice survivability.
- Connects disaster recovery behavior with energy-aware operation instead of analyzing them in isolation.
- Provides a quantitative foundation for choosing consolidation policies under disruption scenarios.
Why this matters
- Disaster survivability is a capacity-planning problem as much as an availability problem.
- Energy-aware consolidation can improve efficiency, but aggressive consolidation may interact with recovery objectives.
- The paper strengthens the News page’s infrastructure-dependability storyline between early 2024 cloud work and later Kubernetes autoscaling work.
Publication record: Published online on June 17, 2024 in Computing, Volume 106, pages 2737-2783 (DOI, Springer article).
May 14, 2024
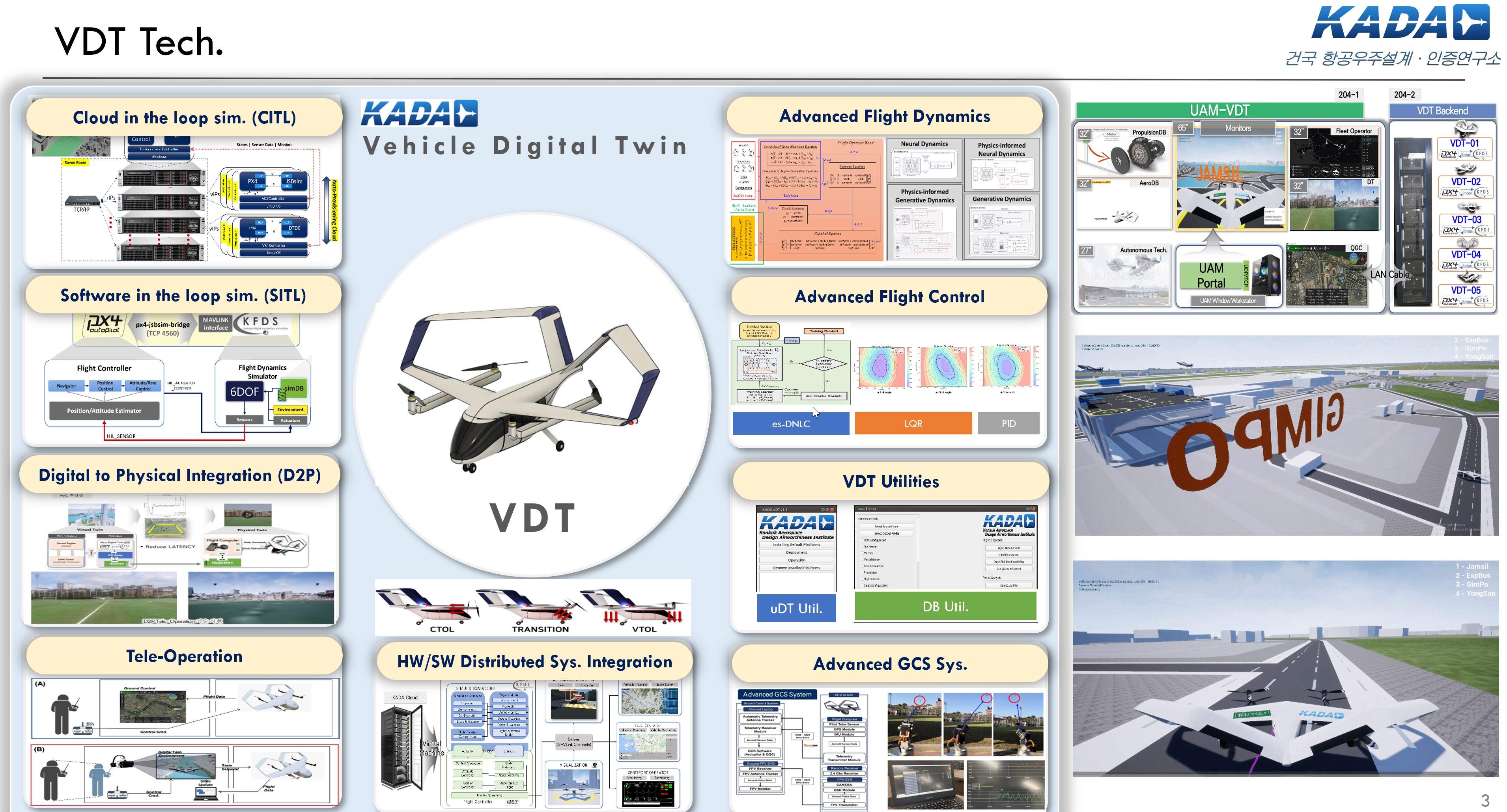
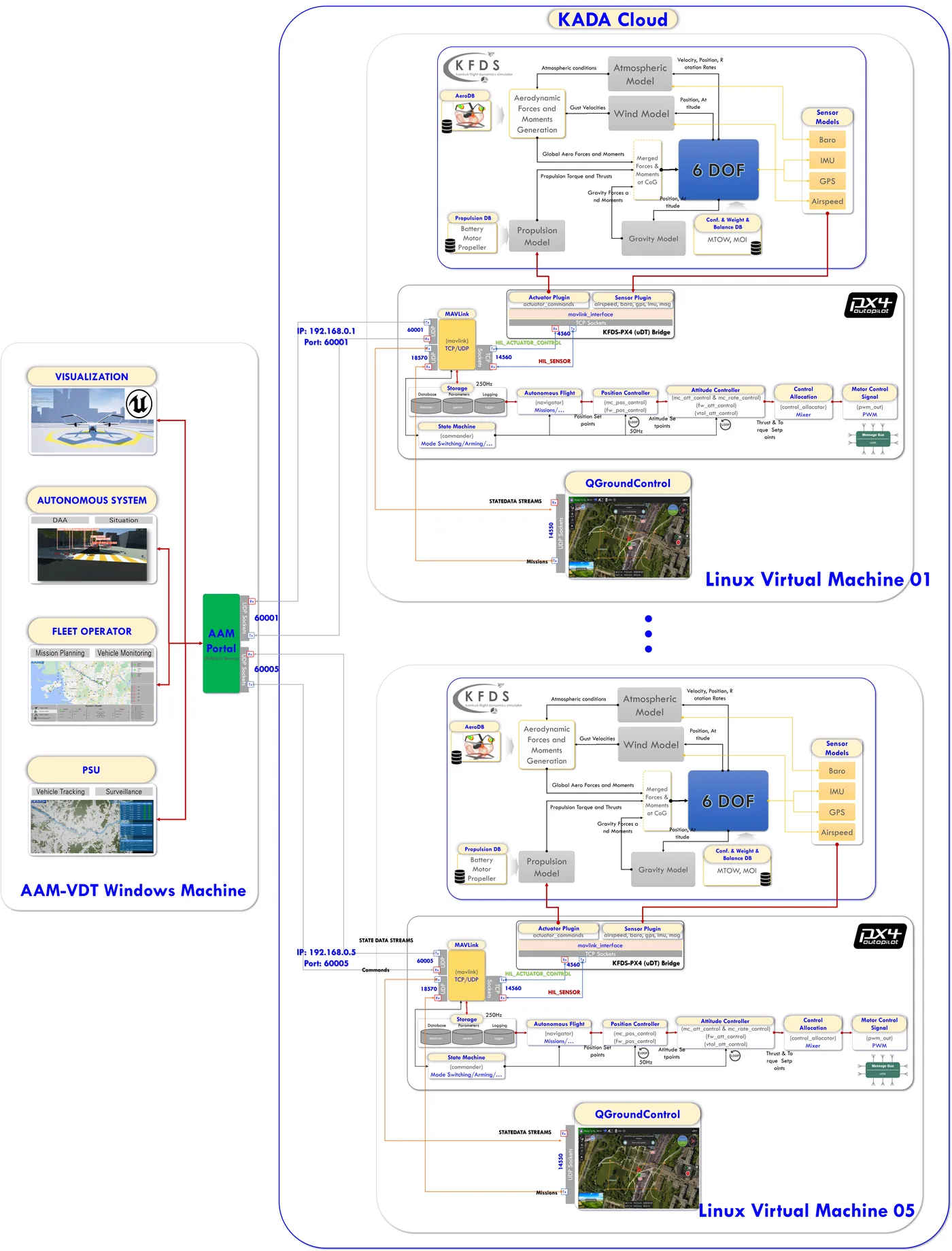
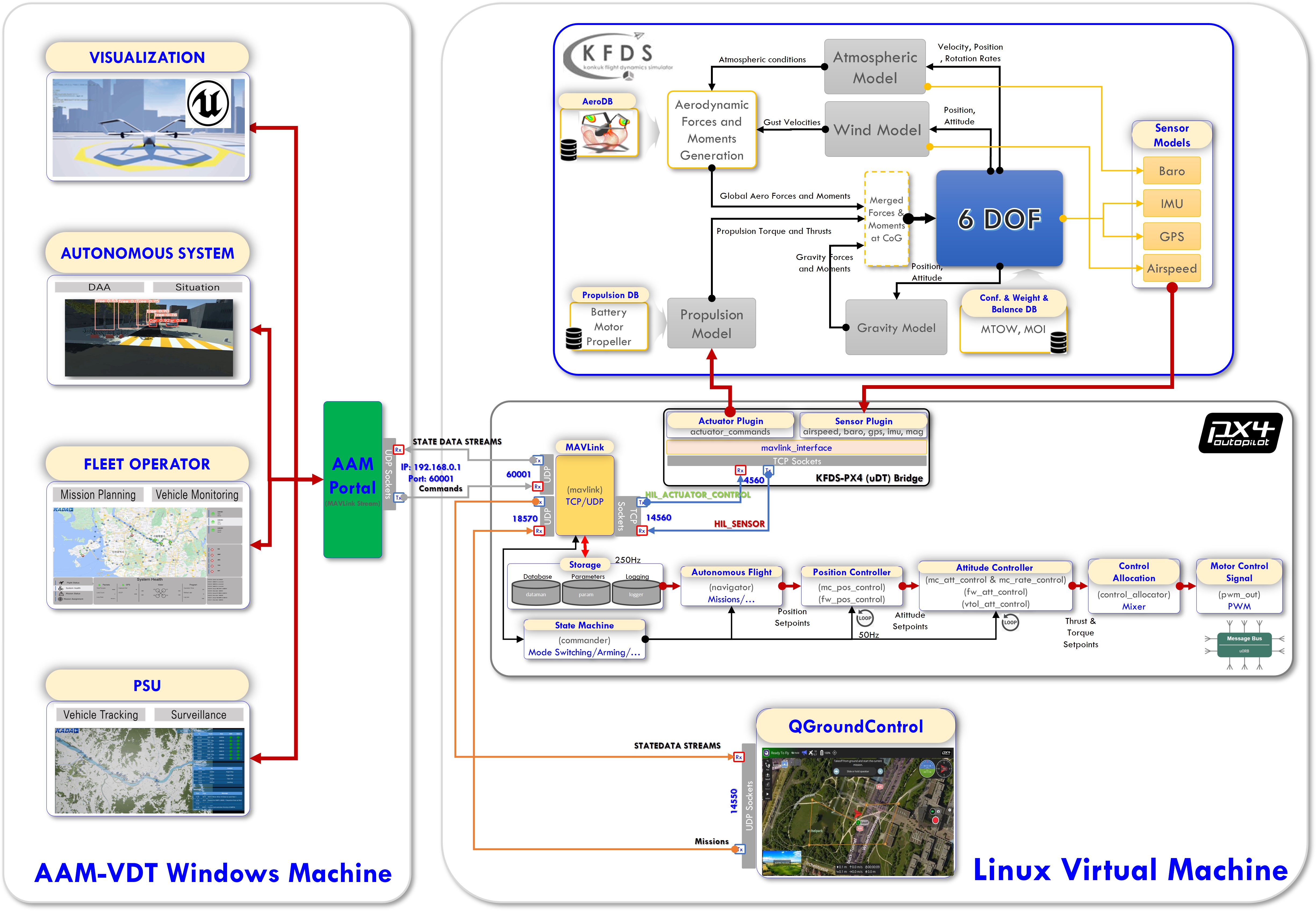
Advanced Air Mobility-Vehicle Digital Twin (AAM-VDT)
This AAM-VDT release presents a vehicle digital twin platform for tele-operations in Advanced Air Mobility. The work brings together cloud computing, AI-assisted operation, simulation, and flight-data exchange around the Konkuk Passenger Vehicle platform, turning the project from a demonstration stack into a research artifact with a clear publication trail.

What the paper contributes
- Integrates cloud-in-the-loop simulation, software-in-the-loop simulation, and operational digital twin components for AAM vehicle studies.
- Connects KP-2/KP2C simulation and flight-test data flows so future twin models can be updated from runtime behavior.
- Frames tele-operation as a safety-critical digital twin problem involving heterogeneous vehicles, real-time monitoring, and operational decision support.
Why this matters
- AAM systems need validation environments where flight dynamics, operator decisions, and cloud infrastructure can be tested before expensive field operations.
- A vehicle digital twin gives researchers a shared backbone for virtual certification, multi-vehicle coordination, and safety-aware scenario design.
- The section now reads visually as a publication/project research story while retaining the original media and demonstration archive below.
Media
- VDT Simulation System
- VDT Concept Illustration
- VDT Simulation in KU Map (01)
- VDT Simulation in KU Map (02)
- VDT Simulation in Seoul Map (Fixed Wing)
- VDT Simulation Scenarios
- KP2C Real Flight Test
- KP2C es-DNLC Flight Test
- KP2C LQR Flight Test
Special thanks to our diligent KADA engineers and researchers! Jeongseok Hyun, Minseok Jang, Taeho Kwag, Nghia Nguyen, Vinh Pham, AYE AYE MAW
Excited about the possibilities that lie ahead as we continue to innovate and drive advancements in advanced air mobility.
Publication record: Posted as AAM-VDT: Vehicle Digital Twin for Tele-Operations in Advanced Air Mobility on arXiv (arXiv abstract, DOI).

May 10, 2024
IEEE/IFIP Network Operations and Management Symposium (NOMS 2024) - 6-10 May 2024 // Seoul, South Korea
I am excited to announce my attendance at the 2024 IEEE/IFIP Network Operations and Management Symposium (NOMS 2024), which took place from May 6 to May 10, 2024, at The-K Hotel in Seoul, South Korea. Returning to Korea after two decades, this symposium was a pivotal event for professionals in the network operations and management field. NOMS 2024 featured an extensive program with keynotes, technical sessions, panel discussions, and various workshops. The theme for this year was “Towards intelligent, reliable, and sustainable network and service management,” focusing on the latest advancements in 5G and emerging 6G networks and their roles in supporting critical applications such as IoT, smart cities, and autonomous vehicles. This event gathered researchers, developers, service providers, and policymakers, offering a unique platform for knowledge exchange and collaboration in shaping the future of network management.
At NOMS 2024, we presented Optimal Resource Utilization in Hyperledger Fabric: A Comprehensive SPN-Based Performance Evaluation Paradigm. The paper studies permissioned blockchain performance through Stochastic Petri Nets, with special attention to endorsement, ordering, commit, resource utilization, and response-time sensitivity.

What the paper contributes
- Develops an SPN model for evaluating Hyperledger Fabric performance under different transaction-arrival and block-size configurations.
- Breaks the blockchain transaction process into endorsement, ordering, and commit phases so bottlenecks can be analyzed with clearer structure.
- Uses case studies and sensitivity analysis to identify which configuration factors most strongly affect mean response time and throughput.
Why this matters
- Permissioned blockchain systems often look reliable at the architectural level but become fragile when configuration choices overload transaction flow.
- A stochastic model gives administrators a pre-deployment way to test resource utilization and capacity planning before operational costs rise.
- The conference version established the performance-modeling foundation that later connects naturally with the journal publication on transactional dynamics.
Publication record: Published in NOMS 2024 - 2024 IEEE Network Operations and Management Symposium, Pages 1-7 (DOI, IEEE Xplore).
Special thanks to our Brazilian team, coordinated by Francisco Airton Silva, Laboratory of Applied Research to Distributed Systems (PASID), Federal University of Piauí (UFPI) (campus Picos), Teresina, Piauí, Brazil, for their collaboration in the research.
During the conference, I had the pleasure of meeting Jin-Hee Cho, a collaborator of my Ph.D. supervisor, Dongseong Kim. Jin-Hee Cho is now an Associate Professor in the Department of Computer Science at Virginia Tech. It was great to converse with her and attend her fascinating research presentation. It’s remarkable how small and interconnected the world can be.
.jpg)
.jpg)
.jpg)
April 1, 2024
Aerial Computing with UAV Data Bridges
This ICT Express article studies aerial computing as a way to extend mobile cloud computing with UAVs acting as data bridges. The contribution treats unmanned aerial vehicles as dependability-relevant infrastructure elements, not only as mobile carriers or isolated sensing platforms.

What the paper contributes
- Models UAV-assisted mobile cloud computing as an aerial data-bridge architecture.
- Uses Markov-chain-based dependability quantification to evaluate how UAV bridges affect service continuity.
- Connects mobile cloud performance with unmanned aerial systems and infrastructure reliability.
Why this matters
- UAVs can expand connectivity, but they also introduce mobility, battery, and failure dynamics that must be modeled.
- Dependability quantification helps determine when aerial relays improve the system and when they add operational risk.
- This post adds the April 2024 aerial-computing publication into the News sequence.
Publication record: Published in April 2024 in ICT Express, Volume 10, Issue 2, pages 389-396 (DOI, ScienceDirect article).
February 23, 2024
YOLOTransfer-DT for UAM Situation Awareness
This Aerospace article presents YOLOTransfer-DT, an operational digital twin framework for collision detection and situation awareness in urban aerial mobility. The work links deep learning, transfer learning, and simulated twin environments so perception models can be trained and evaluated around UAM safety requirements.
What the paper contributes
- Introduces a YOLOTransfer-DT framework for AI training in simulated UAM digital-twin environments.
- Applies deep and transfer learning to collision detection and situation awareness for aerial mobility operations.
- Treats the operational digital twin as a safety-oriented training and validation environment rather than only a visualization layer.
Why this matters
- UAM vehicles need perception systems that can be stress-tested before dense urban deployment.
- Transfer learning can reduce the cost of building specialized detection models for new aerial scenarios.
- The paper gives the News timeline a dedicated post for one of the key early-2024 digital-twin journal publications.
Publication record: Published on February 23, 2024 in Aerospace, Volume 11, Issue 3, Article 179 (DOI, MDPI article).
February 20, 2024
Resource Redundancy for Smart City Dependability
This Cluster Computing article focuses on how redundancy choices influence smart city dependability. Instead of assuming extra resources always improve outcomes, the study uses a model-driven approach to quantify where redundancy helps, where it adds overhead, and how it changes the resilience of connected city services.
What the paper contributes
- Quantifies the impact of resource redundancy on smart city system dependability.
- Uses a model-driven approach to connect infrastructure design choices with availability-oriented outcomes.
- Gives planners a way to compare redundancy strategies before deploying expensive city-scale infrastructure.
Why this matters
- Smart-city systems depend on many interacting resources, so redundancy must be tuned rather than added blindly.
- Model-driven dependability analysis helps expose trade-offs between cost, resilience, and operational complexity.
- This post adds the missing February 2024 smart-city publication into the News page.
Publication record: Published online on February 20, 2024 in Cluster Computing, Volume 27, pages 6059-6079 (DOI, Springer article).
January 1, 2024
Internet of Medical Things Performability Analysis
This International Journal of Computer Applications in Technology article studies the Internet of Medical Things as a performability problem. Medical sensing systems must remain available and responsive while handling constrained devices, edge/fog/cloud resources, and healthcare monitoring workflows that cannot tolerate avoidable bottlenecks.

What the paper contributes
- Evaluates Internet of Medical Things infrastructure through a performability and performance-analysis lens.
- Connects medical monitoring workloads with edge/fog/cloud capacity and service-continuity concerns.
- Adds a healthcare IoT publication milestone to the News chronology.
Why this matters
- Healthcare monitoring systems need both performance and dependability; one without the other is not enough.
- Performability analysis helps identify bottlenecks before they affect medical information flows.
- The post broadens the News page’s IoT coverage beyond smart-city and industrial automation systems.
Publication record: Published in 2024 in International Journal of Computer Applications in Technology, Volume 75, Issue 1, pages 35-47 (DOI, Inderscience record).
January 1, 2024
Event-Based Moving Target Defense with VM Migration
This IEEE Access article studies moving target defense in cloud computing using virtual machine migration. The paper treats defense as a dynamic event-based mechanism: the system changes its attack surface over time, but those movements must be evaluated against migration overhead and service performance.

What the paper contributes
- Models event-based moving target defense in cloud environments using VM migration.
- Connects security adaptation with performance modeling so defense cost is visible.
- Provides a quantitative view of how migration-based defense can reshape exposure while preserving service behavior.
Why this matters
- Moving target defense is only useful if the infrastructure can absorb the migration overhead.
- Performance modeling helps distinguish practical defense schedules from policies that protect security at the expense of service quality.
- This post strengthens the News page’s cloud-security and VM-migration coverage.
Publication record: Published in 2024 in IEEE Access, Volume 12, pages 165539-165554 (DOI, IEEE Xplore record).
January 1, 2024
Energy Consumption in Microservices Architectures
This IEEE Access article reviews energy consumption in microservices architectures. It gives the microservices research line a systematic baseline: before new autoscaling, migration, or consolidation mechanisms can be evaluated fairly, the field needs a clear map of how energy is measured, modeled, and reduced.
What the paper contributes
- Surveys energy-consumption research across microservices architectures.
- Organizes measurement, modeling, and optimization evidence into a structured view of the field.
- Provides context for later work on energy-aware Kubernetes autoscaling and cloud microservice consolidation.
Why this matters
- Microservices make systems easier to evolve, but they can also hide energy costs across many small services.
- A systematic review helps researchers avoid duplicated effort and identify where measurement evidence is still weak.
- This post adds the missing energy-focused review paper to the News archive as a dedicated story.
Publication record: Published in 2024 in IEEE Access, Volume 12, pages 186710-186729 (DOI, IEEE Xplore record).
January 1, 2024
PIND-UAM for Physics-Informed eVTOL Digital Twins
This Transportation Research Procedia paper presents PIND-UAM, a physics-informed neural dynamics approach for boxed-wing eVTOL aircraft in UAM vehicle digital twins. The work connects neural modeling with physics structure so the digital twin can represent vehicle dynamics more credibly than a purely data-driven black box.

What the paper contributes
- Applies physics-informed neural dynamics to boxed-wing eVTOL aircraft modeling.
- Positions the method inside a UAM vehicle digital twin workflow rather than as an isolated neural network.
- Connects aerodynamic behavior, vehicle dynamics, and digital-twin representation for future mobility systems.
Why this matters
- Digital twins for UAM need models that are both learnable from data and constrained by physical behavior.
- Physics-informed dynamics can improve trust in twin behavior when flight-test data are limited or expensive.
- This post completes the early-2024 digital-twin publication cluster alongside YOLOTransfer-DT and AAM-VDT.
Publication record: Published in 2024 in Transportation Research Procedia, Volume 80, pages 30-37 (DOI, ScienceDirect record).
December 20, 2023
Hierarchical Kriging for Multi-Fidelity Aerodynamic Models
This Aerospace article presents an extended hierarchical kriging method for aerodynamic model generation when several low-fidelity datasets are available. The work targets a common aircraft-design problem: teams often have many inexpensive simulations with different fidelity levels, but need a reliable model that can support higher-confidence aerodynamic prediction.
What the paper contributes
- Extends hierarchical kriging to incorporate multiple low-fidelity aerodynamic datasets.
- Uses multi-fidelity structure to improve model generation when high-fidelity aerodynamic evidence is limited or expensive.
- Adds a rigorous aerospace modeling milestone to the News chronology.
Why this matters
- Aerodynamic design depends on trustworthy models built from uneven simulation evidence.
- Multi-fidelity kriging helps turn scattered analysis results into a coherent design surface.
- The dedicated cover replaces a generic archive visual with a publication-specific aerospace illustration.
Publication record: Published online on December 20, 2023 in Aerospace, Volume 11, Issue 1, Article 6 (DOI, MDPI article).
November 28, 2023
UAM Dependability with VANETs and VM Migration
This Sensors article studies Urban Advanced Mobility dependability through a model-based quantification of vehicular ad hoc networks with virtual machine migration. The paper links future mobility operations with the infrastructure behavior needed to keep connected services available under changing network and compute conditions.

What the paper contributes
- Quantifies dependability for UAM communication and compute infrastructure using a model-based approach.
- Connects VANET behavior with virtual machine migration, exposing how mobility and cloud decisions interact.
- Gives the News page a dedicated visual story for late-2023 UAM infrastructure research.
Why this matters
- UAM services will rely on both aerial mobility and robust digital infrastructure.
- VM migration can improve continuity, but it also changes latency and availability behavior.
- A model-based view helps evaluate these trade-offs before deployment.
Publication record: Published online on November 28, 2023 in Sensors, Volume 23, Issue 23, Article 9485 (DOI, MDPI article).
November 15, 2023
Spiking Neural Networks for UAM Flight Dynamics Twins
This Korean Society for Aeronautical & Space Sciences Fall Conference paper introduces a digital-twin flight dynamics model for a UAM vehicle using a spiking neural network. The work frames flight dynamics digitalization through event-driven neural computation, connecting aircraft dynamics with more biologically inspired temporal modeling.

What the paper contributes
- Applies a spiking neural network to flight dynamics modeling for UAM vehicle digital twins.
- Positions event-driven neural dynamics as a way to represent temporal flight behavior.
- Adds conference coverage for the 2023 UAM digitalization research thread.
Why this matters
- Digital twins need dynamic models that can follow changing vehicle states rather than static snapshots.
- Spiking neural networks offer a different computational lens for temporal system behavior.
- The new cover makes the UAM twin concept legible at News-page scale.
Publication record: Presented on November 15, 2023 in the Proceedings of the Korean Society for Aeronautical & Space Sciences Fall Conference 2023, pages 618-619 (DBpia record).
November 15, 2023
Large Language Models for UAM Attitude Stabilization
This conference paper asks whether large language models can help stabilize the attitude of a UAM vehicle. As a preliminary study, it explores a provocative link between modern language-model reasoning interfaces and classical aerospace control questions, especially attitude stabilization in urban air mobility vehicles.

What the paper contributes
- Explores large language models as a preliminary component in UAM attitude stabilization research.
- Connects AI reasoning systems with flight-control workflows rather than treating them as separate domains.
- Adds an early LLM-and-control milestone to the News archive.
Why this matters
- The question is important because autonomous mobility increasingly mixes learning systems with control systems.
- Early studies help clarify where LLMs may assist, supervise, or fail in safety-sensitive aerospace contexts.
- The illustration keeps the AI-control relationship scientific instead of turning it into a generic chatbot visual.
Publication record: Presented on November 15, 2023 in the Proceedings of the Korean Society for Aeronautical & Space Sciences Fall Conference 2023, pages 1411-1412 (DBpia record).
October 19, 2023
Resource Redundancy in Smart City Dependability
This Research Square preprint studies how resource redundancy affects smart city system dependability through a model-driven approach. It treats redundancy as an engineering decision that must be quantified rather than assumed: adding resources may improve availability, but it can also introduce operational complexity and cost.

What the paper contributes
- Quantifies the impact of resource redundancy on smart city dependability.
- Uses a model-driven approach to compare redundancy choices before deployment.
- Establishes the preprint version of the work later represented as a journal publication.
Why this matters
- Smart cities combine sensing, communication, cloud, and edge services into tightly coupled systems.
- Redundancy has to be placed and scaled carefully to improve dependability without waste.
- This entry keeps the preprint milestone visible in chronological order.
Publication record: Posted on October 19, 2023 as a Research Square preprint, rs-3427536 (DOI, Research Square record).
October 17, 2023
PIGD-TL for Transferable Physics-Informed Dynamics
This ICCAS 2023 paper presents PIGD-TL, a physics-informed generative dynamics method with transfer learning. The work sits at the intersection of learning-based dynamics, physics constraints, and reusable modeling knowledge, which is especially relevant when full flight-test or high-fidelity simulation data are limited.

What the paper contributes
- Combines generative dynamics modeling with physics-informed structure.
- Uses transfer learning to move modeling knowledge between related dynamics domains.
- Provides another step toward credible data-driven dynamics for aerospace digital twins.
Why this matters
- Purely data-driven models can drift when data are sparse or conditions change.
- Physics-informed transfer learning can improve reuse while preserving physically plausible behavior.
- The cover highlights the paper’s dynamics-transfer theme instead of generic neural-network imagery.
Publication record: Presented on October 17, 2023 at ICCAS 2023 - 23rd International Conference on Control, Automation and Systems, pages 590-595 (DOI, IEEE Xplore record).
July 9, 2023
eVTOL Tilt Angle Planning with Trim Analysis
This Aerospace Europe Conference paper focuses on tilt angle control planning for eVTOL vehicles using trim analysis. The study addresses a core transition-flight question: how a vehicle should coordinate tilt angle changes so that hover, transition, and cruise behavior remain physically consistent and controllable.
What the paper contributes
- Uses trim analysis to support tilt angle control planning for an eVTOL vehicle.
- Connects vehicle configuration changes with equilibrium and transition behavior.
- Adds a dedicated visual entry for the EUCASS-CEAS 2023 publication.
Why this matters
- Transition flight is one of the defining technical challenges for eVTOL aircraft.
- Trim-based planning helps expose feasible tilt schedules before flight testing.
- The image emphasizes the actual tilt-control problem rather than a generic aircraft scene.
Publication record: Presented on July 9, 2023 at Aerospace Europe Conference 2023: Joint 10th EUCASS - 9th CEAS Conference in Lausanne, Switzerland (DOI, EUCASS record).
July 1, 2023
Adaptive Data Fusion for Non-Uniform Aerodynamic Data
This Chinese Journal of Aeronautics article proposes an adaptive data fusion framework for modeling non-uniform aerodynamic data. The paper responds to a realistic modeling problem: aerodynamic datasets are often uneven, with dense evidence in some regions and sparse observations in others.
What the paper contributes
- Builds an adaptive data fusion framework for non-uniform aerodynamic datasets.
- Supports aerodynamic modeling when measurements or simulations are unevenly distributed.
- Strengthens the News page’s aerospace modeling storyline between kriging and control-planning work.
Why this matters
- Non-uniform data can bias models if sparse and dense regions are treated the same way.
- Adaptive fusion helps preserve useful detail while smoothing across gaps.
- A publication-specific cover makes the data-fusion problem visually clear.
Publication record: Published in 2023 in Chinese Journal of Aeronautics (DOI, ScienceDirect record).
June 6, 2023
Boxed-Wing eVTOL Transition Control Optimization
This ICUAS 2023 paper studies transition control planning and optimization for a boxed-wing eVTOL tiltrotor vehicle using trim analysis. It extends the eVTOL control-planning thread by focusing on a specific vehicle architecture and the optimization needed to move from hover to forward flight.
What the paper contributes
- Plans and optimizes transition control for a boxed-wing eVTOL tiltrotor vehicle.
- Uses trim analysis to keep transition behavior tied to feasible flight conditions.
- Adds a dedicated ICUAS 2023 milestone to the UAM aircraft-control sequence.
Why this matters
- Boxed-wing tiltrotor vehicles bring different geometry and control constraints than conventional configurations.
- Optimization helps select transition paths that remain stable and efficient.
- The new cover communicates the boxed-wing architecture and transition envelope at a glance.
Publication record: Presented on June 6, 2023 at the 2023 IEEE International Conference on Unmanned Aircraft Systems (ICUAS), pages 1128-1135 (DOI, IEEE Xplore record).
May 6, 2023
Personal Key Recovery for Self-Sovereign Identity
This ICACI 2023 paper proposes an efficient personal key recovery approach for self-sovereign identity environments. The work addresses a practical challenge in decentralized identity: users need control over their own credentials, but they also need robust recovery when keys are lost or compromised.

What the paper contributes
- Designs an efficient personal key recovery mechanism for self-sovereign identity.
- Balances user ownership of identity credentials with practical recovery needs.
- Adds a cybersecurity and identity-management publication to the News chronology.
Why this matters
- Self-sovereign identity can fail in practice if key loss becomes unrecoverable.
- Recovery mechanisms must preserve trust, privacy, and user control.
- The cover visualizes recovery as a secure distributed process rather than a simple lock icon.
Publication record: Presented on May 6, 2023 at the 2023 15th International Conference on Advanced Computational Intelligence (ICACI), pages 1-8 (DOI, IEEE Xplore record).
May 6, 2023
iNAV-drlSLAM for Indoor Self-Driving Robots
This ICACI 2023 paper presents iNAV-drlSLAM, an improved indoor self-driving framework for mobile robots using deep reinforcement learning integrated with SLAM. It connects mapping, localization, and learned navigation so robots can reason about indoor movement while building or using spatial structure.
What the paper contributes
- Integrates deep reinforcement learning with SLAM for indoor mobile robot navigation.
- Improves indoor self-driving behavior by combining learned policy decisions with spatial mapping.
- Adds a robotics entry to the 2023 News sequence.
Why this matters
- Indoor robots need more than path planning; they must interpret changing spatial evidence.
- SLAM provides structure, while reinforcement learning supports adaptive decisions.
- The cover shows navigation, mapping, and policy behavior as one connected system.
Publication record: Presented on May 6, 2023 at the 2023 15th International Conference on Advanced Computational Intelligence (ICACI), pages 1-8 (DOI, IEEE Xplore record).
May 6, 2023
QR-GAN: Generative Models Meet Quantile Regression
This ICACI 2023 paper introduces QR-GAN, bringing generative adversarial networks together with quantile regression. The work connects generative modeling with distribution-aware prediction, highlighting uncertainty structure rather than reducing the problem to a single expected value.
What the paper contributes
- Combines GAN-style generative learning with quantile regression.
- Represents uncertainty through multiple quantile bands instead of only point predictions.
- Adds a machine-learning methods paper to the News page’s publication coverage.
Why this matters
- Many AI systems need calibrated distributional behavior, not only plausible generated samples.
- Quantile regression helps expose the spread and asymmetry of outcomes.
- The cover gives the paper a probability-focused visual identity instead of a generic AI graphic.
Publication record: Presented on May 6, 2023 at the 2023 15th International Conference on Advanced Computational Intelligence (ICACI), pages 1-8 (DOI, IEEE Xplore record).
February 18, 2023
UAMDynCon-DT for Data-Driven UAM Dynamics and Control
This ICMCR 2023 paper presents UAMDynCon-DT, a data-driven dynamics and robust control framework for UAM vehicle digitalization. It combines dynamics modeling, control behavior, and digital-twin representation to support future urban air mobility aircraft development.

What the paper contributes
- Builds a framework for UAM vehicle digitalization through data-driven dynamics and robust control.
- Links digital-twin modeling with controller-oriented vehicle behavior.
- Adds an early 2023 UAM digital-twin milestone to the News page.
Why this matters
- UAM digitalization needs both accurate models and control-aware interpretation.
- Robust control helps keep learned or data-driven representations useful in uncertain operating conditions.
- The cover pairs the vehicle and its twin so the system idea is immediately visible.
Publication record: Presented on February 18, 2023 at the 2023 International Conference on Mechatronics, Control and Robotics (ICMCR), pages 81-85 (DOI, IEEE Xplore record).
February 18, 2023
SLAM-DRLnav for Indoor Self-Driving Navigation
This ICMCR 2023 paper presents SLAM-DRLnav, a SLAM-enhanced deep reinforcement learning navigation framework for indoor self-driving. It is closely related to the later ICACI indoor navigation entry, emphasizing how mapping and learned control can be integrated for indoor autonomous movement.

What the paper contributes
- Enhances deep reinforcement learning navigation with SLAM-derived spatial information.
- Targets indoor self-driving scenarios where localization, mapping, and control interact.
- Adds the February 2023 robotics conference record as a dedicated story.
Why this matters
- Indoor autonomy depends on making navigation decisions under partial and evolving maps.
- SLAM-enhanced learning can reduce blind policy behavior by grounding actions in spatial structure.
- The illustration distinguishes this paper from generic robot imagery through map-and-policy visual cues.
Publication record: Presented on February 18, 2023 at the 2023 International Conference on Mechatronics, Control and Robotics (ICMCR), pages 44-48 (DOI, IEEE Xplore record).
January 19, 2023
Robust Attitude Control for PAVs with DNN and CLF
This AIAA SCITECH 2023 paper studies robust attitude control for personal air vehicles using a deep neural network with exponentially stabilizing control Lyapunov functions. The work links neural control with stability guarantees, a crucial concern for flight systems where learning alone is not enough.
What the paper contributes
- Uses DNN-based control together with exponentially stabilizing control Lyapunov functions.
- Focuses on robust attitude control for personal air vehicle applications.
- Adds an AIAA control-theory milestone to the News chronology.
Why this matters
- Neural controllers must be connected to stability arguments before they can be trusted in flight.
- Control Lyapunov functions provide a language for convergence and robustness.
- The cover visualizes stability as a physical control landscape rather than as abstract equations.
Publication record: Presented on January 19, 2023 at AIAA SCITECH 2023 Forum, AIAA 2023-1443 (DOI, AIAA record).
January 11, 2023
Performability of Video Streaming on Demand
This Applied Sciences article evaluates the performability and sensitivity of a video streaming on demand architecture. Instead of considering performance and dependability separately, the study treats the streaming service as an architecture whose user-facing behavior depends on both service speed and availability under different conditions.

What the paper contributes
- Evaluates performability for a video streaming on demand architecture.
- Adds sensitivity analysis so important parameters and bottlenecks are visible.
- Connects media-delivery infrastructure with reliability and performance modeling.
Why this matters
- Streaming systems fail users when either performance or availability degrades.
- Sensitivity analysis helps prioritize which architecture parameters deserve attention.
- The cover makes performability tangible through cloud, edge, and service-flow motifs.
Publication record: Published online on January 11, 2023 in Applied Sciences, Volume 13, Issue 2, Article 998 (DOI, MDPI article).
January 3, 2023
Software Aging in Kubernetes for UAM Digital Twins
This Drones article studies software aging effects on Kubernetes in container orchestration systems for digital twin cloud infrastructures of Urban Air Mobility. It brings cloud-native dependability into the UAM digital-twin context, asking how long-running container orchestration behavior may affect service quality over time.

What the paper contributes
- Analyzes software aging in Kubernetes-based container orchestration.
- Places cloud infrastructure dependability inside the UAM digital-twin setting.
- Adds the January 2023 Drones publication as a dedicated News entry.
Why this matters
- Digital twins depend on cloud services that must remain healthy over long operation periods.
- Software aging can degrade systems gradually, making proactive analysis important.
- The image connects container orchestration with UAM instead of treating Kubernetes as a generic backend.
Publication record: Published online on January 3, 2023 in Drones, Volume 7, Issue 1, Article 35 (DOI, MDPI article).
January 1, 2023
Kubernetes Cloud-Fog Dependability and Power Quantification
This IEEE Access article quantifies dependability and power consumption for Kubernetes-based cloud-fog continuum systems using a model-driven approach. The paper studies how containerized services behave across cloud, fog, and edge-like infrastructure while making both availability and energy visible in the analysis.

What the paper contributes
- Quantifies dependability and power consumption for Kubernetes-based cloud-fog continuum infrastructure.
- Uses model-driven analysis to evaluate service behavior across distributed compute layers.
- Completes the 2023 dedicated News batch with a cloud-infrastructure systems article.
Why this matters
- Cloud-fog systems must balance availability with energy consumption.
- Kubernetes makes deployment flexible, but it also creates new modeling challenges across distributed layers.
- The cover turns this infrastructure trade-off into a clear scientific visual.
Publication record: Published in 2023 in IEEE Access, Volume 11, pages 140826-140852 (DOI, IEEE Xplore record).
November 27, 2022
es-DNLC for PAV Attitude Stabilization
This ICCAS 2022 paper presents es-DNLC, a deep neural network control approach with exponentially stabilizing control Lyapunov functions for personal aerial vehicle attitude stabilization. The work connects learning-based control with stability reasoning, which is essential when neural controllers are considered for flight systems.

What the paper contributes
- Combines deep neural network control with exponentially stabilizing control Lyapunov functions.
- Targets robust attitude stabilization for personal aerial vehicle flight.
- Builds a bridge between AI-based control and stability-aware aerospace design.
Why this matters
- Neural flight controllers need more than performance; they also need credible stability behavior.
- Lyapunov-based structure helps expose whether a learned control law drives states toward equilibrium.
- The cover highlights the control-stability concept instead of showing a generic UAV.
Publication record: Presented on November 27, 2022 at ICCAS 2022 - 22nd International Conference on Control, Automation and Systems, pages 81-86 (DOI, IEEE Xplore record).
November 16, 2022
Cloud-in-the-Loop Digital Twin Simulation for KADA-UAM
This Korean Society for Aeronautical & Space Sciences conference paper introduces a cloud-based digital twin HW/SW framework for multi-mode AI control simulation of eVTOL KADA-UAM personal aerial vehicles. The focus is a cloud-in-the-loop simulation architecture that connects vehicle dynamics, AI control, and distributed compute infrastructure.

What the paper contributes
- Proposes a cloud-based digital twin framework for eVTOL AI control simulation.
- Connects hardware/software simulation with multi-mode control experiments.
- Adds a 2022 foundation for later UAM digital-twin and cloud infrastructure work.
Why this matters
- UAM control research needs simulation environments that can scale beyond local desktop experiments.
- Cloud-in-the-loop design makes compute, control, and vehicle digitalization part of one system.
- The new cover makes the HW/SW digital-twin architecture visible at a glance.
Publication record: Presented on November 16, 2022 in The Korean Society for Aeronautical & Space Sciences Conference, pages 138-139 (DBpia record).
November 16, 2022
Neural Lyapunov Control for Hovering eVTOL Attitude
This conference paper studies attitude stabilization of an eVTOL vehicle in hovering mode using neural-network-based control with Lyapunov theorem. It is part of the same 2022 aerospace-control thread as es-DNLC, focusing specifically on hover-mode attitude behavior.

What the paper contributes
- Applies neural-network-based control to eVTOL attitude stabilization in hovering mode.
- Uses Lyapunov reasoning to frame control stability.
- Adds a conference milestone for early eVTOL control experimentation.
Why this matters
- Hovering is a demanding regime where attitude errors can quickly affect vehicle safety.
- Neural controllers must be interpreted through stability-aware methods before they can be trusted.
- The cover keeps the focus on hover stabilization and Lyapunov structure.
Publication record: Presented on November 16, 2022 in The Korean Society for Aeronautical & Space Sciences Conference, pages 322-323 (DBpia record).
November 5, 2022
Energy-Efficient Offloading for Edge Devices
This Energies article proposes an energy-efficient offloading approach based on a cognitive energy management scheme for edge computing devices. The paper studies how computation can be shifted while optimizing energy use, which matters for edge devices that must balance performance demand with limited power budgets.

What the paper contributes
- Designs an energy-aware offloading scheme for edge computing devices.
- Connects cognitive energy management with workload placement and energy optimization.
- Adds an energy-focused edge computing record to the News timeline.
Why this matters
- Edge systems are useful only when they can deliver low-latency computation without draining constrained devices.
- Offloading decisions must consider both compute demand and energy behavior.
- The cover visualizes power and workload as a joint optimization problem.
Publication record: Published online on November 5, 2022 in Energies, Volume 15, Article 8273 (DOI, MDPI article).
October 10, 2022
Fusion-Multiactor-Attention-Critic for Multi-UAV Control
This Energies article presents a multiagent reinforcement learning method based on a fusion-multiactor-attention-critic architecture for multiple-UAV navigation control. The work explores how multiple aerial agents can coordinate navigation while using attention and critic mechanisms to improve shared decision-making.

What the paper contributes
- Applies multiagent reinforcement learning to multiple-UAV navigation control.
- Uses fusion, multiactor, attention, and critic components to support coordinated decision-making.
- Strengthens the News page’s AI autonomy and UAV-control coverage.
Why this matters
- Multi-UAV navigation requires coordination, not only independent local control.
- Attention mechanisms can help agents focus on the most relevant interactions.
- The cover conveys cooperative navigation and policy learning in one visual system.
Publication record: Published online on October 10, 2022 in Energies, Volume 15, Issue 19, Article 7426 (DOI, MDPI article).
October 1, 2022
Hierarchical Survivability Models for Industrial IoT
This IEEE Cloud Summit paper models survivability and resiliency in an Internet of Industrial Things system using hierarchical models. The study brings dependability modeling into industrial cyber-physical infrastructure, where failures can affect sensing, production, gateways, and edge services at the same time.
What the paper contributes
- Uses hierarchical models to evaluate survivability and resiliency in Industrial IoT.
- Connects industrial devices, gateways, and edge/cloud resources in one dependability view.
- Adds a dedicated 2022 Industrial IoT systems entry to the News page.
Why this matters
- Industrial IoT failures can cascade across sensors, networks, and compute layers.
- Hierarchical models help study complex systems without flattening important dependencies.
- The illustration makes survivability and resiliency visible as structured recovery behavior.
Publication record: Presented on October 1, 2022 at 2022 IEEE Cloud Summit, pages 118-123 (DOI, IEEE Xplore record).
September 30, 2022
Blockchain Federated Learning for UAM Digital Twins
This APISAT 2021 proceedings chapter studies blockchain-empowered federated learning with edge computing for digital twin systems in Urban Air Mobility. It combines three important ideas for UAM infrastructure: privacy-preserving distributed learning, edge computing, and trustworthy update coordination.

What the paper contributes
- Combines blockchain, federated learning, and edge computing for UAM digital twin systems.
- Supports distributed model updates without centralizing all operational data.
- Adds an early secure-learning milestone to the UAM digital-twin research line.
Why this matters
- UAM digital twins will need to learn from distributed infrastructure while preserving trust.
- Edge federated learning can reduce data movement and support localized adaptation.
- The cover avoids generic blockchain imagery by tying the ledger concept to UAM model updates.
Publication record: Published on September 30, 2022 in The Proceedings of APISAT 2021, Lecture Notes in Electrical Engineering 913 (DOI, Springer chapter).
September 30, 2022
Multi-Agent Reinforcement Learning for UAS Logistics
This APISAT 2021 proceedings chapter applies multi-agent reinforcement learning to UAS control for logistics environments. The work focuses on coordinated autonomous aerial systems in delivery-style operational contexts, where multiple agents must plan routes, avoid conflicts, and respond to changing demands.

What the paper contributes
- Applies multi-agent reinforcement learning to UAS control in logistics settings.
- Frames route coordination and resource movement as a learning-based autonomy problem.
- Adds a logistics-focused UAS control entry to the News chronology.
Why this matters
- Aerial logistics depends on coordinated decisions across multiple vehicles.
- Multi-agent learning can help encode cooperative behavior beyond single-vehicle navigation.
- The image emphasizes logistics coordination rather than generic drone flight.
Publication record: Published on September 30, 2022 in APISAT 2021, Lecture Notes in Electrical Engineering 913 (DOI, Springer chapter).
September 30, 2022
Decentralized Swarm UAV Control for Persistent Surveillance
This APISAT 2021 proceedings chapter presents a deep multi-agent reinforcement learning based decentralized swarm UAV control framework for persistent surveillance. The paper focuses on distributed coordination, coverage behavior, and multi-agent autonomy in civil monitoring scenarios.

What the paper contributes
- Develops a decentralized swarm UAV control framework using deep multi-agent reinforcement learning.
- Supports persistent surveillance coverage without relying on a single centralized controller.
- Adds a swarm-autonomy counterpart to the logistics-focused APISAT entry.
Why this matters
- Persistent coverage requires coordination across space and time, not one-off route planning.
- Decentralized control can improve robustness when agents or links change.
- The cover shows civil coverage fields and distributed policy behavior without militarized framing.
Publication record: Published on September 30, 2022 in APISAT 2021, Lecture Notes in Electrical Engineering 913 (DOI, Springer chapter).
September 5, 2022
Deep Learning for Rapid Airfoil Inverse Design
This International Journal of Aeronautical and Space Sciences article presents a rapid airfoil inverse design method using a deep neural network and hyperparameter selection. The paper focuses on accelerating the design loop: starting from aerodynamic targets and producing suitable airfoil geometry more efficiently.
What the paper contributes
- Uses deep neural networks for rapid airfoil inverse design.
- Includes hyperparameter selection as part of the model-building workflow.
- Adds an aerospace design automation milestone to the News page.
Why this matters
- Airfoil inverse design can be slow when each candidate requires heavy aerodynamic evaluation.
- Deep learning can shorten iteration cycles when trained and tuned carefully.
- The cover makes the target-to-geometry transformation visually explicit.
Publication record: Published online on September 5, 2022 in International Journal of Aeronautical and Space Sciences (DOI, Springer article).
August 12, 2022
Link Lifetime Prediction for VANET Offloading
This Sensors article evaluates link lifetime prediction to support computational offloading decisions in vehicular ad hoc networks. The paper studies a practical edge-computing problem: vehicles can offload computation only when communication links are likely to remain usable long enough.

What the paper contributes
- Evaluates link lifetime prediction for VANET computational offloading.
- Connects vehicle mobility, communication stability, and edge resource decisions.
- Adds a vehicular edge-computing publication to the News chronology.
Why this matters
- Offloading can fail if a vehicle loses its link before work is completed.
- Link lifetime prediction helps choose when and where to offload computation.
- The cover communicates mobility-aware networking instead of a generic connected-car scene.
Publication record: Published online on August 12, 2022 in Sensors, Volume 22, Issue 16, Article 6038 (DOI, MDPI article).
July 27, 2022
Survivability Evaluation of Medical Edge Networks
This IEEE ICCE 2022 paper presents a hierarchical model based survivability and resiliency evaluation of medical edge networks. It extends the dependability research thread into healthcare edge environments, where sensor data, local compute, and service continuity are tightly linked.
What the paper contributes
- Uses hierarchical models to evaluate medical edge network survivability and resiliency.
- Links healthcare sensing workflows with edge infrastructure dependability.
- Adds a healthcare edge counterpart to the Industrial IoT survivability entry.
Why this matters
- Medical edge systems must keep services available even when components degrade or fail.
- Hierarchical modeling helps capture how local failures affect the broader monitoring service.
- The cover visualizes healthcare edge resilience without relying on patient imagery.
Publication record: Presented on July 27, 2022 at 2022 IEEE Ninth International Conference on Communications and Electronics (ICCE), pages 87-92 (DOI, IEEE Xplore record).
June 24, 2022
hLSTM-Aging for Software Aging Forecasting
This Applied Sciences article presents hLSTM-Aging, a hybrid LSTM model for software aging forecasting. The paper targets a subtle reliability problem: long-running software systems can degrade gradually, so forecasting that degradation can support earlier rejuvenation and better service planning.

What the paper contributes
- Proposes a hybrid LSTM model for forecasting software aging.
- Connects time-series learning with dependability management and rejuvenation planning.
- Adds a machine-learning reliability paper to the News archive.
Why this matters
- Software aging often appears as gradual degradation rather than sudden failure.
- Forecasting helps operators intervene before quality-of-service drops.
- The cover shows aging as a time-dependent reliability signal rather than an abstract bug.
Publication record: Published online on June 24, 2022 in Applied Sciences, Volume 12, Issue 13, Article 6412 (DOI, MDPI article).
June 20, 2022
Mission Dependability Design for Unmanned Aerial Systems
This AIAA AVIATION 2022 paper studies model-driven mission dependability design of unmanned aerial systems. It frames UAS missions as dependability design problems where route, system state, recovery choices, and mission success must be considered together.

What the paper contributes
- Applies model-driven dependability design to unmanned aerial system missions.
- Connects mission phases with reliability, recovery, and system behavior.
- Adds a mission-level UAS dependability entry to the News page.
Why this matters
- UAS reliability is not only about components; it also depends on mission context.
- Model-driven design helps evaluate mission alternatives before flight operations.
- The cover represents mission dependability as a route-and-state system.
Publication record: Presented on June 20, 2022 at AIAA AVIATION 2022 Forum, AIAA 2022-4091 (DOI, AIAA record).
April 20, 2022
Fog-Aided Availability Evaluation for Smart Buildings
This Electronics Letters article supports availability evaluation of a smart building monitoring system aided by fog computing. It brings dependability analysis into smart-building IoT, where local sensing and fog-layer computation can improve service responsiveness and continuity.

What the paper contributes
- Evaluates availability for a smart building monitoring system aided by fog computing.
- Connects building sensors, local fog resources, and monitoring service continuity.
- Adds a smart-building IoT milestone to the News chronology.
Why this matters
- Smart buildings rely on continuous monitoring across many sensors and local services.
- Fog computing can reduce latency and support local availability.
- The cover makes the building-fog-monitoring relationship visually concrete.
Publication record: Published online on April 20, 2022 in Electronics Letters (DOI, IET article).
March 1, 2022
Switch-Over Moving Target Defense in SDN
This Journal of Network and Computer Applications article evaluates the performability of switch-over Moving Target Defense mechanisms in Software Defined Networking using stochastic reward nets. The work studies security adaptation and service quality together, which is important because defense actions can change network performance.

What the paper contributes
- Evaluates switch-over Moving Target Defense mechanisms in SDN.
- Uses stochastic reward nets to study performability, not only isolated security behavior.
- Adds a network defense and dependability publication to the News page.
Why this matters
- Security mechanisms can protect systems while also disrupting performance.
- Performability analysis helps quantify that security-service trade-off.
- The cover shows MTD as an adaptive network mechanism rather than a generic cybersecurity icon.
Publication record: Published in March 2022 in Journal of Network and Computer Applications, Volume 199, Article 103267 (DOI).
February 18, 2022
Smart Hospital Sensor Dependability with Redundancy and Rejuvenation
This Sensors article quantifies how energy resource redundancy and server rejuvenation affect the dependability of medical sensor networks in smart hospitals. It brings model-driven dependability analysis into healthcare IoT infrastructure, where availability and recovery directly affect monitoring continuity.

What the paper contributes
- Quantifies the dependability impact of energy resource redundancy in medical sensor networks.
- Studies server rejuvenation as a mechanism for improving smart hospital infrastructure reliability.
- Adds a healthcare IoT dependability article to the 2022 News sequence.
Why this matters
- Medical sensor networks must remain available while operating under resource constraints.
- Redundancy and rejuvenation can improve reliability, but their impact must be modeled.
- The cover ties energy, sensing, and server recovery into one hospital infrastructure visual.
Publication record: Published online on February 18, 2022 in Sensors, Volume 22, Issue 4, Article 1595 (DOI, MDPI article).
February 5, 2022
Performance-Cost Trade-Offs in Cloud Auto-Scaling
This Sensors article studies the performance-cost trade-off in auto-scaling mechanisms for cloud computing. The paper considers how cloud systems should scale resources when demand changes, while making both service quality and resource cost visible in the decision.

What the paper contributes
- Evaluates performance-cost trade-offs in cloud auto-scaling mechanisms.
- Connects workload demand, resource capacity, performance, and operating cost.
- Adds a cloud resource-management publication to the News archive.
Why this matters
- Auto-scaling can improve performance, but extra resources increase cost.
- Quantitative trade-off analysis helps choose scaling policies that match operational goals.
- The cover makes scaling behavior readable as a systems optimization problem.
Publication record: Published online on February 5, 2022 in Sensors, Volume 22, Issue 3, Article 1221 (DOI, MDPI article).
January 1, 2022
Mobile Games at the Edge for Capacity Planning
This CLOSER 2022 paper evaluates mobile games at the edge to guide resource capacity planning. It studies how edge resources can support latency-sensitive gaming workloads, using performance evaluation to inform how much capacity should be provisioned.

What the paper contributes
- Evaluates edge computing support for mobile gaming workloads.
- Uses performance analysis to guide resource capacity planning.
- Adds an application-facing edge computing entry to the News page.
Why this matters
- Mobile games can be highly sensitive to latency and resource contention.
- Edge capacity planning helps avoid overprovisioning while preserving user experience.
- The cover connects gaming workload demand with edge resource decisions.
Publication record: Presented in 2022 at the 12th International Conference on Cloud Computing and Services Science (CLOSER), pages 238-245 (DOI).
January 1, 2022
Steering Behavior for Multiple RUAV Obstacle Avoidance
This Intelligent Automation & Soft Computing article studies steering behavior based obstacle avoidance control for multiple rotary UAVs. The work focuses on coordinated collision avoidance, where several aerial vehicles must move safely through obstacle-rich environments while maintaining controllable trajectories.

What the paper contributes
- Applies steering behavior to multiple RUAV obstacle avoidance control.
- Represents collision avoidance as coordinated path behavior across several aerial vehicles.
- Completes the 2022 dedicated News batch with an autonomy and control article.
Why this matters
- Multi-UAV systems need reliable obstacle avoidance before they can operate in shared environments.
- Steering behavior offers a practical control layer for local collision avoidance.
- The cover clearly shows obstacle geometry, avoidance paths, and multi-agent coordination.
Publication record: Published in 2022 in Intelligent Automation & Soft Computing, Volume 34, Issue 1, pages 575-591 (DOI, Tech Science record).
November 1, 2021
IoMT Dependability and Security on the Cloud-Fog-Edge Continuum
This IEEE Internet of Things Journal article quantifies dependability and security for an Internet of Medical Things infrastructure built on a cloud-fog-edge continuum. The work treats healthcare monitoring as a layered system, where sensors, edge devices, fog resources, cloud services, and security controls all affect end-to-end trustworthiness.

What the paper contributes
- Quantifies dependability and security for an IoMT healthcare monitoring infrastructure.
- Uses hierarchical modeling to connect device, edge, fog, and cloud behavior.
- Adds a high-impact IoMT systems article to the News chronology.
Why this matters
- Healthcare monitoring depends on both service availability and security assurance.
- Cloud-fog-edge design introduces many layers, so modeling helps reveal where resilience is gained or lost.
- The cover turns the continuum architecture into a clear scientific systems visual.
Publication record: Published in 2021 in IEEE Internet of Things Journal (DOI, IEEE Xplore record).
October 27, 2021
D/M/c/K/FCFS Routing Models for the Internet of Robotic Things
This Electronics article evaluates message routing strategies in the Internet of Robotic Things using a D/M/c/K/FCFS queuing network. It studies how robotic devices, cloud-fog layers, and routing policies interact when messages must move through constrained service stations.

What the paper contributes
- Evaluates Internet of Robotic Things routing strategies with a D/M/c/K/FCFS queuing model.
- Connects robotic message flows with cloud-fog computing performance.
- Provides a journal extension of the IoRT routing research thread.
Why this matters
- Routing choices directly affect response time and resource bottlenecks in robotic IoT systems.
- Queuing models help compare strategies before deploying robotic services.
- The cover distinguishes queueing-based routing from generic robot networking imagery.
Publication record: Published online on October 27, 2021 in Electronics, Volume 10, Issue 21, Article 2626 (DOI, MDPI article).
October 17, 2021
Cloud-Fog Message Routing for the Internet of Robotic Things
This IEEE SMC 2021 paper compares message routing strategies for Internet of Robotic Things systems across cloud-fog computing layers using M/M/c/K queuing networks. It focuses on the same core problem as the later journal article, but in a conference setting: how should robotic messages be routed when service capacity and delay matter?

What the paper contributes
- Compares IoRT message routing strategies across cloud and fog layers.
- Uses M/M/c/K queuing networks to represent service capacity and message delay.
- Adds the conference milestone behind the broader IoRT routing line.
Why this matters
- Robotic services need low-latency communication across distributed compute layers.
- Routing strategies must be evaluated under capacity constraints, not only topological reachability.
- The illustration highlights routing as a queueing and cloud-fog systems problem.
Publication record: Presented on October 17, 2021 at 2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC), pages 2049-2054 (DOI, IEEE Xplore record).
September 27, 2021
Performability and Sensitivity of Home Automation Systems
This DS-RT 2021 paper assesses performability and sensitivity in a home automation system. The work uses stochastic modeling to study how automated home services behave under different operational conditions, including the ways small parameter changes can affect availability and responsiveness.

What the paper contributes
- Evaluates performability for a home automation system.
- Adds sensitivity analysis to expose which parameters most influence behavior.
- Extends the IoT dependability research line into residential automation.
Why this matters
- Smart homes need reliable automation, not only connected devices.
- Sensitivity analysis helps identify where design choices most affect service quality.
- The cover visualizes the home as a monitored cyber-physical system rather than a consumer gadget scene.
Publication record: Presented on September 27, 2021 at 2021 IEEE/ACM 25th International Symposium on Distributed Simulation and Real Time Applications (DS-RT), pages 1-4 (DOI, IEEE Xplore record).
September 17, 2021
Medical Information Systems with Edge/Fog Fail-Over
This Sensors article evaluates load balancing and fail-over strategies for medical information systems with edge/fog computing using stochastic reward nets. It studies how healthcare information flows can remain performant and available when distributed compute resources shift load or recover from failures.
What the paper contributes
- Evaluates load balancing and fail-over strategies for medical information systems.
- Uses stochastic reward nets to quantify performability in edge/fog healthcare infrastructure.
- Adds a healthcare systems reliability milestone to the 2021 News sequence.
Why this matters
- Medical information systems must handle failures while maintaining service continuity.
- Edge/fog computing can improve responsiveness, but the fail-over behavior must be modeled.
- The cover ties healthcare service paths to measurable resilience.
Publication record: Published online on September 17, 2021 in Sensors, Volume 21, Issue 18, Article 6253 (DOI, MDPI article).
August 23, 2021
Queueing Models for IoT Sensor Networks in Smart Buildings
This Sensors article assesses IoT sensor networks in smart buildings using queuing models. It examines the performance side of smart-building infrastructure, where many sensing streams share gateways and services that can become bottlenecks.
What the paper contributes
- Uses queuing models to assess smart-building IoT sensor network performance.
- Connects sensor traffic, gateways, and service capacity in a performance model.
- Adds another smart-building infrastructure publication to the News archive.
Why this matters
- Smart buildings can generate many concurrent sensing streams.
- Queueing analysis helps reveal bottlenecks before monitoring quality degrades.
- The cover shows the building as a networked performance system.
Publication record: Published online on August 23, 2021 in Sensors, Volume 21, Issue 16, Article 5660 (DOI, MDPI article).
August 10, 2021
UAV Data Offloading Dependability Evaluation
This Electronics article evaluates the dependability of offloading data through unmanned aerial vehicles. The paper studies UAVs as mobile communication and data-offloading elements, connecting aerial mobility with service reliability and availability modeling.

What the paper contributes
- Evaluates dependability when data are offloaded through UAVs.
- Models UAV-assisted communication as part of a distributed service chain.
- Adds a UAV networking and dependability entry to the News page.
Why this matters
- UAVs can extend data collection and communication, but moving relays introduce reliability questions.
- Dependability evaluation helps expose where offloading paths can fail.
- The cover emphasizes the UAV as a systems component rather than a standalone aircraft.
Publication record: Published online on August 10, 2021 in Electronics, Volume 10, Issue 16, Article 1916 (DOI, MDPI article).
June 2, 2021
Dependable Blockchain and AI Engines for UAM Digital Twins
This Korean Society for Aeronautical & Space Sciences conference paper looks toward dependable blockchain and AI engines for digital twin systems in Urban Air Mobility. It anticipates later UAM digital-twin work by focusing on the trust, intelligence, and system dependability needed for twin-enabled mobility infrastructure.

What the paper contributes
- Frames blockchain and AI engines as dependability components for UAM digital twin systems.
- Connects secure update coordination with intelligent twin behavior.
- Adds an early 2021 UAM digital-twin conference milestone to the News chronology.
Why this matters
- UAM digital twins require both trustworthy data flows and intelligent decision support.
- Blockchain-inspired coordination can support integrity while AI engines support adaptation.
- The cover avoids cryptocurrency symbolism and focuses on dependable twin infrastructure.
Publication record: Presented on June 2, 2021 in The Korean Society for Aeronautical & Space Sciences Conference, pages 408-409 (DBpia record).
April 29, 2021
Stochastic Planning for Mobile Edge Performance and Availability
This Applied Sciences article studies stochastic model driven performance and availability planning for a mobile edge computing system. It focuses on planning resource behavior in mobile edge environments where workload demand, service latency, and availability need to be considered together.

What the paper contributes
- Uses stochastic modeling for performance and availability planning in mobile edge computing.
- Connects resource allocation, workload demand, and service continuity.
- Adds a foundational MEC planning article to the News archive.
Why this matters
- Mobile edge systems must plan for both responsiveness and availability.
- Stochastic models help represent uncertainty and variable workload behavior.
- The cover visualizes planning as a joint performance and reliability problem.
Publication record: Published online on April 29, 2021 in Applied Sciences, Volume 11, Issue 9, Article 4088 (DOI, MDPI article).
April 27, 2021
iADA*-RL for Autonomous UAV Path Planning
This Applied Sciences article presents iADA*-RL, an anytime graph-based path planning method with deep reinforcement learning for an autonomous UAV. The work links graph search, online replanning, and learning-based decision support for aerial navigation.

What the paper contributes
- Combines anytime graph-based path planning with deep reinforcement learning.
- Targets autonomous UAV navigation where route quality and replanning speed both matter.
- Adds an AI autonomy planning paper to the 2021 News sequence.
Why this matters
- UAV path planning must adapt when obstacles or goals change.
- Anytime planning provides usable solutions while continuing to improve them.
- The cover shows graph search and learned policy behavior in a single navigation scene.
Publication record: Published online on April 27, 2021 in Applied Sciences, Volume 11, Issue 9, Article 3948 (DOI, MDPI article).
April 7, 2021
Smart City Surveillance Dependability with Stochastic Models
This Electronics article evaluates the dependability of a surveillance system in smart cities based on stochastic models. It studies the infrastructure side of civic monitoring, where sensors, edge services, and communication paths must remain reliable for a city-scale service to work.

What the paper contributes
- Evaluates smart city surveillance system dependability using stochastic models.
- Connects sensor infrastructure, communication paths, and service availability.
- Adds a smart-city systems dependability article to the News chronology.
Why this matters
- City-scale monitoring services depend on distributed infrastructure, not only individual sensors.
- Stochastic modeling helps quantify how failures affect service continuity.
- The cover keeps the surveillance theme civic and systems-oriented.
Publication record: Published online on April 7, 2021 in Electronics, Volume 10, Issue 8, Article 876 (DOI, MDPI article).
January 1, 2021
Internet of Healthcare Things Performance with M/M/c/K Models
This IEEE Access article evaluates an Internet of Healthcare Things architecture for medical monitoring using M/M/c/K queuing models. It studies the performance behavior of healthcare monitoring services where devices, gateways, and cloud or edge resources share finite service capacity.

What the paper contributes
- Evaluates Internet of Healthcare Things performance for medical monitoring.
- Uses M/M/c/K queuing models to represent finite service capacity and workload behavior.
- Completes the 2021 dedicated News batch with an IEEE Access healthcare systems paper.
Why this matters
- Healthcare monitoring infrastructure needs predictable performance under concurrent demand.
- Queuing models help expose bottlenecks and capacity limits before deployment.
- The cover presents healthcare monitoring as a measurable service system.
Publication record: Published in 2021 in IEEE Access, Volume 9, pages 55271-55283 (DOI, IEEE Xplore record).
November 18, 2020
iUAM Service Survivability for Digital Twin Urban Aerial Mobility
This Korean Society for Aeronautical & Space Sciences conference paper is an early step in the UAM digital-twin line. It focuses on service survivability: how a digital twin for urban aerial mobility can keep its service chain meaningful when mobility, networked infrastructure, and dependent services are exposed to failures.

What the paper contributes
- Frames UAM as a digital-twin service system rather than only an aircraft or traffic-management problem.
- Connects mobility services with survivability, redundancy, and continuity concerns.
- Adds an early UAM digital-twin milestone that foreshadows later advanced air mobility research.
Why this matters
- Urban aerial mobility depends on many connected services that must remain available under disruption.
- Digital twins become more useful when their dependability is considered as part of the architecture.
- The cover emphasizes service survivability across both aircraft and city infrastructure.
Publication record: Presented on November 18, 2020 in The Korean Society for Aeronautical & Space Sciences Conference, pages 689-690 (DBpia record).
January 14, 2020
Hierarchical Availability and Security Modeling for IoT Infrastructure
This Electronics article proposes a hierarchical framework for quantifying both availability and security in IoT infrastructures. The central idea is to model IoT as a layered system, where devices, gateways, communication paths, and services create coupled reliability and security behavior.
What the paper contributes
- Introduces a hierarchical modeling approach for IoT infrastructures with both dependability and security concerns.
- Supports quantitative analysis across multiple layers instead of treating the IoT stack as one flat model.
- Links service availability with the security posture of connected devices and communication components.
Why this matters
- IoT deployments fail through both component outages and compromised service paths.
- Hierarchical models help analysts scale from device-level behavior to infrastructure-level metrics.
- The cover uses layered clouds, edge nodes, and protected paths to mirror the paper’s model structure.
Publication record: Published online on January 14, 2020 in Electronics, Volume 9, Issue 1, Article 155 (DOI, MDPI article).
January 1, 2019
Cloud Data Center Reliability with Hierarchical Models
This IEEE Access article evaluates reliability and availability for cloud data center networks using hierarchical models. It treats cloud infrastructure as a structured stack whose network, server, and service layers need to be analyzed together to understand real continuity behavior.
What the paper contributes
- Uses hierarchical modeling to evaluate reliability and availability in cloud data center networks.
- Connects lower-level infrastructure components with higher-level service availability.
- Provides a formal basis for comparing network designs and recovery choices.
Why this matters
- Cloud services can fail through interactions between network and compute layers.
- Hierarchical models keep large infrastructure evaluations tractable without hiding important dependencies.
- The cover represents data centers as layered reliability systems rather than isolated server racks.
Publication record: Published in 2019 in IEEE Access (DOI, IEEE Xplore record).
November 3, 2018
SRN Assessment for Software-Defined Network Infrastructure
This Journal of Supercomputing article studies reliability, availability, and operational cost for software-defined network infrastructure using stochastic reward nets. It brings control-plane and data-plane behavior into a quantitative model so SDN resilience can be evaluated alongside cost.

What the paper contributes
- Applies stochastic reward nets to SDN infrastructure with reliability, availability, and cost in the same analysis.
- Makes controller and network component behavior visible as measurable state transitions.
- Helps compare operational choices that may improve availability while changing cost.
Why this matters
- SDN centralizes important control logic, so controller availability affects the whole network.
- Cost-aware dependability analysis helps avoid designs that are resilient but operationally inefficient.
- The cover visualizes SDN as both a network topology and a stochastic evaluation model.
Publication record: Published online on November 3, 2018 in The Journal of Supercomputing (DOI, Springer article).
June 6, 2018
SRN Modeling for Data Center Availability Quantification
This book chapter in Dependability Engineering presents a stochastic reward net based modeling approach for quantifying data center availability. It packages the modeling workflow as a reusable method for translating data center architecture into availability and reward-based measures.
What the paper contributes
- Explains how stochastic reward nets can model data center availability at system level.
- Connects architectural redundancy, failure behavior, repair behavior, and reward measures.
- Provides a book-chapter reference for readers entering dependability modeling.
Why this matters
- Data center availability is shaped by architecture and recovery policy, not by component reliability alone.
- SRN models give designers a way to compare alternatives before expensive deployment choices are made.
- The cover makes the method visually explicit through server layers and reward-net state structure.
Publication record: Published on June 6, 2018 in Dependability Engineering (DOI, IntechOpen chapter).
May 18, 2018
Correction: Virtualized Server Availability and Operational Cost
This correction keeps the scholarly record accurate for the Journal of Supercomputing article on virtualized server availability and operational cost. Including the correction in News ensures the publication trail points readers toward the most reliable version of the record.

What the paper contributes
- Makes the correction visible alongside the original virtualized-server modeling work.
- Preserves citation clarity for readers following the availability and cost analysis.
- Keeps the News archive aligned with the official publisher record.
Why this matters
- Dependability modeling papers are often reused as references for later quantitative studies.
- A visible correction helps readers avoid working from stale or incomplete metadata.
- The cover presents the correction as a refined model record rather than a separate technical claim.
Publication record: Published on May 18, 2018 in The Journal of Supercomputing, Volume 74, page 2903 (DOI, Springer article).
April 27, 2018
Scalable Network-Area Storage with Virtualization
This ICISS 2018 paper models scalable network-area storage with virtualization using stochastic reward nets. It focuses on storage infrastructure as a dependable service layer where virtualization and scaling choices affect both availability and operational behavior.
What the paper contributes
- Applies SRN modeling to a virtualized network-area storage architecture.
- Connects scalability, storage virtualization, and availability evaluation in one model.
- Adds storage infrastructure to the broader dependability modeling line.
Why this matters
- Storage reliability is a foundation for cloud, edge, and data-intensive applications.
- Virtualization improves flexibility but also creates new dependencies that should be modeled.
- The cover shows storage as a layered service fabric with quantified resilience paths.
Publication record: Presented on April 27, 2018 at ICISS ‘18 in Jeju, Republic of Korea (DOI, ACM record).
January 13, 2018
Sensitivity Modeling for an Active-Active Genesis Cloud
This INISCOM 2017 paper studies model-based sensitivity for a disaster-tolerant active-active genesis cloud system. The work asks which timing and reliability parameters matter most when cloud services are designed to remain active across redundant sites.
What the paper contributes
- Uses model-based sensitivity analysis to identify high-impact parameters in a disaster-tolerant cloud design.
- Represents active-active redundancy as a measurable availability architecture.
- Connects failure, repair, and synchronization behavior to cloud service continuity.
Why this matters
- Disaster-tolerant systems can look resilient while still depending heavily on a few sensitive parameters.
- Sensitivity analysis helps engineers prioritize the parameters that deserve careful measurement and tuning.
- The cover visualizes paired cloud sites and failover behavior instead of generic cloud imagery.
Publication record: Published on January 13, 2018 in INISCOM 2017, Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering (DOI, Springer chapter).
August 28, 2017
Virtualized Server Availability and Operational Cost
This Journal of Supercomputing article provides a comprehensive evaluation of availability and operational cost for a virtualized server system using stochastic reward nets. It studies how virtualization, failure handling, and recovery strategy jointly affect service continuity and operating expense.

What the paper contributes
- Builds an SRN-based evaluation of virtualized server availability and operational cost.
- Studies how virtualization and recovery policies shape both continuity and expense.
- Provides a detailed modeling reference for later server and data-center dependability work.
Why this matters
- Availability decisions often carry cost consequences that are invisible in reliability-only studies.
- Virtualized systems require system-level modeling because failures can propagate through shared layers.
- The cover presents the server platform as a quantified recovery and cost system.
Publication record: Published online on August 28, 2017 in The Journal of Supercomputing (DOI, Springer article).
August 15, 2017
Fog-IoT Reliability and Availability Modeling
This BIGDAS 2017 conference paper studies reliability and availability modeling for a fog-computing based IoT system. It places IoT devices, fog nodes, and service infrastructure into a dependability frame where edge proximity and distributed components both matter.

What the paper contributes
- Models a fog-computing based IoT system through reliability and availability metrics.
- Connects device, fog, and cloud layers as a distributed service chain.
- Adds fog-IoT dependability to the publication timeline before later smart environment studies.
Why this matters
- Fog computing reduces latency, but it also adds distributed failure points.
- IoT service quality depends on the whole path from sensors to fog and cloud resources.
- The cover highlights fog infrastructure as a measurable reliability layer.
Publication record: Presented on August 15, 2017 at The 5th International Conference on Big Data Applications and Services (BIGDAS 2017) in Jeju Island, South Korea (Publications page).
December 1, 2016
Virtualized System Availability with Stochastic Reward Nets
This IEEE CIT 2016 paper models and analyzes the availability of a virtualized system using stochastic reward nets. It focuses on how virtualized resources, failure behavior, and recovery paths combine into measurable service availability.
What the paper contributes
- Applies stochastic reward nets to virtualized system availability analysis.
- Represents virtualized components and recovery behavior as state-based dependability dynamics.
- Provides a conference reference for the larger virtualized infrastructure modeling line.
Why this matters
- Virtualization improves resource flexibility, but shared layers can change failure behavior.
- SRN modeling makes those dependencies explicit and measurable.
- The cover connects abstract state transitions with a concrete virtualized infrastructure scene.
Publication record: Presented on December 1, 2016 at the 2016 IEEE International Conference on Computer and Information Technology (CIT) (DOI, IEEE Xplore record).
November 23, 2016
SDN Availability, Reliability, and Power Consumption
This UCAWSN/CUTE/CSA 2016 paper evaluates availability, reliability, and power consumption for an SDN infrastructure using stochastic reward nets. It extends the SDN modeling story beyond uptime by making energy and power behavior part of the same systems view.

What the paper contributes
- Evaluates SDN infrastructure using availability, reliability, and power-consumption metrics together.
- Uses stochastic reward nets to capture both failure-recovery behavior and efficiency trade-offs.
- Links network dependability with energy-aware infrastructure operation.
Why this matters
- Network designs should not optimize uptime while ignoring power behavior.
- SDN control logic can become a dependability and efficiency bottleneck when modeled at system level.
- The cover presents SDN as a power-aware resilience architecture.
Publication record: Published on November 23, 2016 in Advances in Computer Science and Ubiquitous Computing, Lecture Notes in Electrical Engineering 421 (DOI, Springer chapter).
March 1, 2016
Disaster-Tolerant Data Center Availability Modeling
This Future Generation Computer Systems article models and analyzes data center availability for disaster tolerance. It studies how redundant architecture and recovery behavior can protect service continuity when large disruptions affect a data center environment.

What the paper contributes
- Models data center availability with explicit disaster-tolerance behavior.
- Connects architecture, failure events, and recovery actions to measurable continuity.
- Provides a major journal reference in the data-center dependability sequence.
Why this matters
- Disaster tolerance requires more than component redundancy; recovery timing and dependency structure matter.
- Quantitative modeling helps compare resilience options before a real incident tests them.
- The cover emphasizes geographic and service-level continuity between data center sites.
Publication record: Published in March 2016 in Future Generation Computer Systems, Volume 56, pages 27-50 (DOI, ScienceDirect article).
November 1, 2015
Software-Defined Network Availability Modeling
This IEEE PRDC 2015 paper models and analyzes the availability of a software-defined network. It treats SDN as a dependability system where controller availability, switch behavior, and network paths need to be understood together.
What the paper contributes
- Brings availability modeling to software-defined networking infrastructure.
- Connects SDN controller behavior with network-level service continuity.
- Establishes an early dependability reference for later SDN reliability and cost studies.
Why this matters
- SDN promises programmable control, but that control plane must itself be dependable.
- Availability modeling helps reveal where redundancy or recovery design is needed.
- The cover frames SDN as a coupled control and forwarding reliability problem.
Publication record: Presented on November 1, 2015 at the 2015 IEEE Pacific Rim International Symposium on Dependable Computing (PRDC) (DOI, IEEE Xplore record).
January 1, 2015
Data Center Network Sensitivity for Business Continuity
This Mathematical Problems in Engineering article performs a comprehensive sensitivity analysis of a data center network with server virtualization for business continuity. It asks which parameters most affect continuity when data center networking and virtualized servers interact.
What the paper contributes
- Applies sensitivity analysis to a virtualized data center network.
- Identifies which parameters most influence continuity and availability outcomes.
- Connects server virtualization with network-level resilience planning.
Why this matters
- Business continuity depends on knowing which parameters deserve the most operational attention.
- Sensitivity analysis helps prioritize measurement, tuning, and redundancy investment.
- The cover visualizes the data center as a parameter-sensitive continuity system.
Publication record: Published in 2015 in Mathematical Problems in Engineering, Article ID 521289 (DOI, Hindawi article).
December 1, 2014
High-Availability Security Architecture for DDoS Resilience
This ICCIC 2014 paper models and analyzes a cost-effective high-availability security architecture for whole-of-government systems facing DDoS attacks. It joins security architecture with availability modeling so defense choices can be evaluated as service-continuity decisions.
What the paper contributes
- Models a high-availability security architecture for large public-sector systems.
- Connects DDoS resilience with availability and cost-effective architecture design.
- Extends dependability modeling into security-driven service continuity.
Why this matters
- DDoS attacks are availability attacks as much as security events.
- Government-scale services need defensible designs that remain reachable during disruption.
- The cover balances civic infrastructure, security filtering, and redundant service paths.
Publication record: Presented in December 2014 at ICCIC 2014 (DOI, IEEE Xplore record).
February 17, 2014
Virtualized Servers Network Availability Modeling
This ICCA 2014 paper models and analyzes availability in a virtualized servers network. It is part of the early virtualized-infrastructure research thread, where server networks are treated as systems with shared resources, recovery actions, and measurable service continuity.

What the paper contributes
- Builds an availability model for a virtualized servers network.
- Represents shared server-network dependencies that influence service continuity.
- Provides an early conference foundation for later SRN-based virtualized system studies.
Why this matters
- Virtualized server networks can fail through interactions between compute and network layers.
- Quantitative availability models help identify where recovery and redundancy matter most.
- The cover uses physical racks and transparent virtual layers to match that coupled structure.
Publication record: Presented on February 17, 2014 at ICCA 2014 in Yangon, Myanmar (paper PDF).
January 1, 2014
Virtualized Servers Availability with Stochastic Reward Nets
This Scientific World Journal article presents a comprehensive availability modeling and analysis of a virtualized servers system using stochastic reward nets. It formalizes how virtualized server components, failures, repairs, and service states interact over time.

What the paper contributes
- Develops an SRN-based availability model for a virtualized servers system.
- Connects physical server behavior, virtual machine behavior, and recovery states.
- Establishes a journal baseline for later virtualized infrastructure dependability studies.
Why this matters
- Virtualization changes how failures affect hosted services, so simple component models are not enough.
- SRN analysis supports quantitative comparison of recovery strategies and architectural choices.
- The cover pairs the virtualized stack with a visible reward-net structure.
Publication record: Published in 2014 in The Scientific World Journal, Article ID 165316 (DOI, Hindawi article).
December 3, 2013
Satellite On-Board Computer Virtualization Proposal
This IEICE technical report proposes virtualization technology for satellite on-board computer systems with hardware redundancy, software rejuvenation, and virtual machine live migration. It brings cloud-style dependability concepts into the constrained and safety-sensitive environment of spacecraft computing.
What the paper contributes
- Proposes virtualization for satellite on-board computer reliability and maintainability.
- Combines hardware redundancy, software rejuvenation, and virtual machine live migration.
- Connects dependability modeling ideas with aerospace embedded-computing constraints.
Why this matters
- Space systems need high reliability under strict resource and repair limitations.
- Virtualization and rejuvenation can provide design options for fault management in onboard software.
- The cover makes the satellite computing stack and migration concept visible in one scene.
Publication record: Published on December 3, 2013 in IEICE Technical Report, SANE2013-98, pages 157-162 (IEICE record).
February 26, 2013
Unmanned Airship Applications and Embedded Control
This ICCA 2013 paper discusses practical and potential applications of an unmanned airship based on automatic control and embedded computer system design. It connects flight-platform design with embedded control architecture, sensing, and autonomous operation.

What the paper contributes
- Frames unmanned airship applications around automatic control and embedded computer design.
- Links vehicle-level operation with the onboard computing architecture needed to support it.
- Adds an early aerospace cyber-physical systems entry to the News timeline.
Why this matters
- Airship autonomy depends on reliable embedded control, not only vehicle aerodynamics.
- Application planning benefits from understanding the onboard computation and sensing stack.
- The cover keeps the airship central while revealing the embedded control system underneath.
Publication record: Presented on February 26, 2013 at ICCA 2013 in Yangon, Myanmar (Publications page).
November 1, 2012
Automatic Embedded Control for an Unmanned Airship
This ICCAIS 2012 paper presents the design and implementation of automatic embedded control hardware and software systems in an unmanned airship. It focuses on making autonomous airship operation practical through onboard electronics, control logic, and software integration.
What the paper contributes
- Designs and implements embedded hardware and software for automatic airship control.
- Connects sensing, processing, and actuation inside an aerial cyber-physical platform.
- Provides an implementation-oriented foundation for later unmanned airship architecture work.
Why this matters
- Autonomous flight requires dependable integration between control software and embedded hardware.
- Implementation details are critical when a research platform must move from concept to field testing.
- The cover shows the airship as a complete embedded-control system rather than a standalone vehicle.
Publication record: Presented on November 1, 2012 at ICCAIS 2012 in Ho Chi Minh City, Vietnam (DOI, IEEE Xplore record).
June 1, 2012
Embedded Hardware and Software Architecture for an Unmanned Airship
This ICESS 2012 paper presents the embedded hardware and software architecture of an unmanned airship. It emphasizes how onboard computing, control software, sensing, and vehicle actuation can be organized into a coherent architecture.

What the paper contributes
- Defines an embedded hardware and software architecture for an unmanned airship.
- Organizes onboard computing, sensing, and actuation into an integrated control platform.
- Documents the architecture side of the early unmanned airship research thread.
Why this matters
- Clear embedded architecture makes autonomous aerial platforms easier to implement, test, and extend.
- Airship research benefits from a system view that joins software modules with physical hardware.
- The cover turns the architecture into a single clean engineering scene.
Publication record: Presented in June 2012 at ICESS-2012 in Liverpool, UK (DOI, IEEE Xplore record).
September 14, 2010
Lessons from the F-1 Nano-Satellite Fabrication Project
This Space Technology and Application Scientific Workshop 2010 paper records lessons learned from the F-1 nano-satellite fabrication project. It gives the News archive an origin point in practical aerospace fabrication, where hardware assembly, testing, and team learning shape the final mission system.

What the paper contributes
- Documents fabrication lessons from the F-1 nano-satellite project.
- Captures practical spacecraft-building knowledge from assembly, integration, and team experience.
- Extends the News chronology back to an early aerospace systems milestone.
Why this matters
- Small-satellite projects depend on disciplined fabrication and testing as much as design ambition.
- Lessons learned help later teams avoid repeating costly integration mistakes.
- The cover presents the project as precise aerospace engineering rather than a generic satellite image.
Publication record: Presented on September 14, 2010 at Space Technology and Application Scientific Workshop 2010 in Hanoi, Vietnam (Publications page).