News
Recent research highlights, conference activities, project milestones, media, demonstrations, and publication updates.
Curated on March 24, 2026. The publication stories below were cross-checked against DOI records, publisher pages, conference proceedings, accepted-paper listings, arXiv, and the publications list on this site, then rewritten as brochure-style research highlights.
February 22, 2026
VAE+DDPG for Autonomous Navigation in Low-Light Environments
We are pleased to share a new open-access article in Advanced Intelligent Systems that tackles a practical robotics bottleneck: indoor navigation when ambient light drops and depth sensing becomes unreliable. Instead of treating low-light degradation as only a control problem, the paper redesigns the representation itself so the policy learns from geometry-focused latent features rather than directly from brightness-sensitive observations.

What the paper contributes
- Introduces an attention-enhanced VAE+ encoder that combines Feature Pyramid Network (FPN) structure and CBAM attention to learn illuminance-robust depth features.
- Couples that encoder with Deep Deterministic Policy Gradient (DDPG) and jointly tunes the perception module and control policy instead of freezing the encoder after pretraining.
- Evaluates the method in cluttered Gazebo navigation scenes and unseen-maze transfer tests; the public codebase shows a TurtleBot3-style setup with dual depth cameras and goal-conditioned state inputs.
Why this matters
- Crossref metadata for the published abstract says the learned latent space shifts toward geometric features rather than raw intensity values, which is exactly the right bias when low-light sensing degrades.
- A public abstract summary indexed alongside the DOI reports roughly 88% success at 30 Lx and almost 94% at 300 Lx, while plain DDPG stabilizes near 70% and unseen-maze transfer drops only about 3 points.
- The published abstract also states that deployment processes depth frames at 10 Hz on a single RTX 4070, suggesting the method is practical not only in simulation but also as an affordable indoor autonomy pipeline.
Publication record: Published online on February 22, 2026 in Advanced Intelligent Systems as open access, article e202500636 (DOI, Wiley article, code repository).
December 5, 2025
S-iNAS: Performance-Centric Scaling for Ceph-Based Industrial Storage
We are pleased to share the publication of S-iNAS in the Journal of Network and Systems Management. The paper addresses a systems problem that matters directly to Industry 4.0 and digital twin deployments: how to keep Ceph-based industrial network-attached storage responsive when data streams become bursty, highly concurrent, and operationally uneven.

What the paper contributes
- Introduces an SRN-based modeling framework that captures concurrent read and write workflows, replication overhead, and dynamic scaling triggers for Ceph Object Storage Daemons (OSDs).
- Compares two scaling policies head-to-head: scheduled time-based expansion and event-based expansion driven by workload thresholds.
- Studies the effect of arrival rate, client concurrency, VM instantiation delay, and read/write composition on throughput and latency.
Why this matters
- The Springer abstract shows that time-based scaling stays stable under moderate load but can react too slowly when demand spikes abruptly.
- Event-based scaling adapts faster and helps reduce latency, though it may cause more frequent reconfigurations.
- The paper turns these trade-offs into actionable guidance for tuning storage services in industrial workflows and digital twin ecosystems.
Publication record: Published online on December 5, 2025 in Journal of Network and Systems Management, Volume 34, Article 34 (DOI, Springer article).
December 1, 2025
Availability Modeling for Edge Systems under Correlated Failures
We are pleased to highlight a new publication in the Journal of The Korea Society of Computer and Information that focuses on a realism gap in edge dependability studies: failures in edge environments are often correlated rather than isolated. When power, network, or site-level disruptions strike multiple nodes at once, recovery policies that look effective under independent-failure assumptions can behave very differently in practice.

What the paper contributes
- Extends an SRN-based edge availability model to explicitly represent correlated failures rather than only independent ones.
- Defines a Capacity-Oriented Availability (COA) metric that captures the overhead of High Availability (HA) and Live Migration (LM) policies.
- Uses discrete-event sensitivity analysis to compare recovery behavior across different failure intervals and correlated-failure scales.
Why this matters
- The public abstract reports that the combined HA+LM policy performs better when failure intervals are long.
- The same abstract reports a policy reversal once the number of correlated-failure nodes exceeds 5, because LM node-search overhead slows recovery during larger incidents.
- This turns the paper into practical guidance for adaptive recovery design in edge platforms rather than a fixed-policy recommendation.
Publication record: Published on December 1, 2025 in Journal of The Korea Society of Computer and Information, 30(12), 25-35 (DOI, public abstract record).
November 1, 2025
Energy-Aware Kubernetes Autoscaling for Microservices
Our recent article in the Journal of Network and Computer Applications studies Kubernetes autoscaling from a more useful engineering perspective: not only whether a deployment stays responsive, but whether it does so without wasting electrical power. This is especially important for cloud and edge platforms that must balance service quality, infrastructure cost, and sustainability at the same time.

What the paper contributes
- Builds a Generalized Stochastic Petri Net (GSPN) model for Kubernetes-orchestrated microservices that jointly represents Horizontal Pod Autoscaling (HPA), Cluster Autoscaling (CA), application behavior, and infrastructure capacity.
- Introduces the Energy-Response Time Weighted Product (ERWP) metric to evaluate performance and energy efficiency together rather than in isolation.
- Uses sensitivity analysis and realistic case studies to reveal which autoscaling parameters most strongly influence energy use, throughput, and response time.
Why this matters
- The publisher abstract reports that higher autoscaling thresholds under low workloads can reduce electrical consumption by about 32% without materially hurting performance.
- Under high arrival-rate conditions, the same choice can still cut consumption by about 37%, but at the cost of a 175% increase in response time.
- The result is a concrete workload-aware guide for tuning Kubernetes deployments instead of relying on heuristic trial and error.
Publication record: Published in November 2025 in Journal of Network and Computer Applications, Volume 243, Article 104287 (DOI, ScienceDirect article).
October 14, 2025
Maintenance-Centered Dependability for Urban Surveillance
This Computing article reframes smart-city surveillance as a maintenance problem as much as a sensing or analytics problem. Urban surveillance platforms may include cameras, edge resources, communication links, and repair workflows, and their dependability depends heavily on how failures are anticipated, prioritized, and handled over time.

What the paper contributes
- Uses Stochastic Petri Net (SPN) models to compare reactive, autonomous, and preventive maintenance strategies in an edge-enabled surveillance environment.
- Integrates availability and reliability analysis into a unified maintenance-evaluation framework.
- Applies sensitivity analysis to identify which components matter most for system availability and therefore deserve the greatest maintenance focus.
Why this matters
- The Springer abstract emphasizes that maintenance strategy has a direct effect on the dependability and efficiency of urban surveillance systems.
- It also highlights sensitivity analysis as the key mechanism for identifying high-impact components instead of spreading maintenance effort evenly.
- For smart-city operators, that means maintenance planning can be made more targeted, more resilient, and more cost-effective.
Publication record: Published on October 14, 2025 in Computing, Volume 107, Article 208 (DOI, Springer article).
September 1, 2025
RT-VLM: Re-Thinking Vision-Language Robustness for Real-World Recognition
We are also excited to share RT-VLM, a new arXiv preprint focused on one of the most persistent problems in real-world perception: domain shift. When image statistics, viewing angles, occlusion patterns, or neighboring object classes change, recognition performance often drops sharply. RT-VLM tackles that problem by combining structured multimodal evidence with an explicit self-correction loop.

What the paper contributes
- Introduces a synthetic dataset generation pipeline annotated with four structured clues: bounding boxes, class names, object-level captions, and a scene-level context caption.
- Uses parameter-efficient supervised tuning of Llama 3.2 11B Vision Instruct on that multimodal supervision.
- Applies a two-stage inference process in which the model first generates its own clues and then re-examines them as evidence to iteratively correct the final recognition result.
Why this matters
- The arXiv abstract frames RT-VLM around four important sources of robustness failure: low-level image variation, pose and viewpoint change, partial occlusion, and confusion among nearby classes.
- The reported gains across robustness benchmarks suggest that structured evidence plus self-critique is a promising direction for more reliable real-world visual perception.
- This is particularly relevant for embodied AI, robotics, and safety-critical recognition settings where robustness matters more than single-dataset accuracy.
Publication record: Posted on September 1, 2025 as an arXiv preprint (arXiv abstract, DOI).
August 27, 2025
Aging Dependability for AAM Vehicle Digital Twins
This MetaCom 2025 short paper expands digital-twin evaluation beyond realism and integration into the question of long-running dependability. For advanced air mobility (AAM) platforms, a cloud-edge-in-the-loop simulation stack is only useful if it can stay dependable while synchronizing models, services, and data flows over time.

What the paper contributes
- Studies a cloud-edge-in-the-loop platform for an AAM vehicle digital twin rather than an isolated simulator component.
- Frames the core research problem around aging dependability, which is especially important for persistent, always-on metaverse and digital-twin systems.
- Positions dependability evaluation as part of digital-twin architecture design for aviation-oriented experimentation.
Why this matters
- The official MetaCom record verifies the work as a 2025 short paper on metaverse cloud-edge computing for vehicle digital twins.
- This perspective is important because operational twin platforms degrade under sustained service time, not only under single-shot test conditions.
- It strengthens the bridge between digital-twin fidelity and trustworthy long-duration experimentation for AAM.
Publication record: Published on August 27, 2025 in the Proceedings of the 2025 International Conference on Metaverse Computing, Networking and Applications (MetaCom) (DOI, accepted papers).
August 27, 2025
High-Availability Quantification for Metaverse Storage Backbones
Persistent metaverse environments depend on storage systems that keep state available across distributed services and users. This MetaCom 2025 paper brings formal availability modeling directly into that layer, asking how resilience in distributed storage should be quantified rather than assumed.

What the paper contributes
- Uses Stochastic Reward Nets to quantify high availability in metaverse-oriented distributed storage.
- Places storage dependability inside the architectural core of immersive systems instead of treating it as a backend afterthought.
- Extends your broader dependability modeling line into storage infrastructures designed for persistent virtual environments.
Why this matters
- The official MetaCom program lists the paper in Conference Session 1: Metaverse Computing, Architectures, and Applications.
- That placement reflects the architectural significance of storage availability for immersive services, digital assets, and synchronized state.
- The result is a stronger basis for reasoning about resilience in metaverse infrastructures before deployment.
Publication record: Published on August 27, 2025 in the Proceedings of the 2025 International Conference on Metaverse Computing, Networking and Applications (MetaCom) (DOI, MetaCom program).
August 27, 2025
Sim-to-Real Reinforcement Learning with ROS2 and Unreal Engine
This MetaCom 2025 workshop paper focuses on one of robotics’ most practical bottlenecks: how to make virtual training transfer into physical behavior. By combining ROS2, Unreal Engine, and reinforcement learning for TurtleBot experimentation, the work treats metaverse-ready simulation as a deployment bridge rather than only a visualization environment.

What the paper contributes
- Couples a ROS2 + Unreal Engine stack with reinforcement learning for TurtleBot-based sim-to-real experimentation.
- Treats the metaverse as a controllable training and evaluation environment for robot behavior transfer.
- Connects virtual-world experimentation with physical navigation deployment in a concrete robotics workflow.
Why this matters
- The official MetaCom program lists the paper in Workshop Session 1, confirming its role in testbed-oriented metaverse research.
- Sim-to-real transfer remains a central barrier in robotic learning systems, especially when moving from controlled simulation to messy physical environments.
- This paper makes the metaverse framing operational by tying it directly to deployable robot-control practice.
Publication record: Published on August 27, 2025 in the Proceedings of the 2025 International Conference on Metaverse Computing, Networking and Applications (MetaCom) (DOI, MetaCom program).
August 27, 2025
LLM-Based Malicious Code Detection for Metaverse Security
As metaverse platforms become more programmable, security questions move closer to code generation, code review, and automated filtering pipelines. This MetaCom 2025 paper addresses that direction by studying malicious code detection with large language models and by treating token optimization as part of the detection design space.

What the paper contributes
- Frames malicious code detection as an LLM-based security analysis task.
- Uses token optimization as the main lever for improving code-oriented model behavior.
- Places code-security tooling squarely inside metaverse security research rather than outside it.
Why this matters
- The official MetaCom program places the paper in Conference Session 4: Security, Privacy, and Trust.
- That positioning shows the work is not only about language models, but about securing programmable metaverse ecosystems.
- The paper therefore points toward a practical developer-security workflow for safer code handling in immersive platforms.
Publication record: Published on August 27, 2025 in the Proceedings of the 2025 International Conference on Metaverse Computing, Networking and Applications (MetaCom) (DOI, MetaCom program).
August 27, 2025
Iterative Prompt Optimization for Diverse Metaverse Tasks
This workshop paper treats prompting not as a one-off instruction-writing trick, but as an adaptive optimization problem. In metaverse applications where tasks can vary widely across content generation, interaction, assistance, and moderation, that shift matters because prompt quality becomes part of system performance.

What the paper contributes
- Proposes an iterative prompt optimization framework for improving LLM performance across diverse tasks.
- Reframes prompts as adaptive artifacts that can be refined through repeated feedback rather than fixed text strings.
- Extends LLM performance engineering into metaverse application workflows.
Why this matters
- The MetaCom program confirms the work as part of Workshop Session 1, where experimental and framework-oriented systems were presented.
- In practice, metaverse tasks are heterogeneous, so prompt behavior often needs to be tuned across contexts instead of reused unchanged.
- This makes the paper especially relevant for robust, reusable LLM tooling in interactive virtual environments.
Publication record: Published on August 27, 2025 in the Proceedings of the 2025 International Conference on Metaverse Computing, Networking and Applications (MetaCom) (DOI, MetaCom program).
August 27, 2025
PGELU for Stable and Scalable Metaverse Perception
This MetaCom 2025 paper introduces PGELU, a parametric GELU variant designed for recognition workloads that span both emotional signals and 3D object understanding. That combination is notable because metaverse perception often mixes human-centered and scene-centered recognition tasks in the same pipeline.

What the paper contributes
- Proposes a parametric GELU formulation for metaverse-driven deep learning.
- Targets the stability and scalability of recognition pipelines for emotion analysis and 3D object recognition.
- Highlights activation design itself as a useful lever in metaverse perception systems.
Why this matters
- The official MetaCom program places the paper in Conference Session 2: AI for the Metaverse.
- That context underscores the paper’s relevance to practical AI architectures in immersive environments.
- The work is therefore meaningful not only as a new activation variant, but as a systems-oriented attempt to stabilize mixed perception workloads.
Publication record: Published on August 27, 2025 in the Proceedings of the 2025 International Conference on Metaverse Computing, Networking and Applications (MetaCom) (DOI, MetaCom program).
August 1, 2025
Queueing-Theoretic Performance Design for Cloud-Edge-Sensor Data Harvesting
Published in ICT Express, this paper studies how cloud-edge-sensor infrastructures can be sized and tuned for data harvesting systems, with agricultural monitoring as a motivating application. Rather than treating sensing pipelines as black boxes, the work uses queueing theory to expose where latency, overload, and under-provisioning emerge before costly infrastructure changes are made.

What the paper contributes
- Models a Cloud-Edge-sensors architecture using M/M/c/K queueing theory to evaluate data-handling performance in sensing systems.
- Analyzes how configuration choices affect efficiency, scalability, and real-time data handling.
- Provides a predictive framework for identifying bottlenecks and adjusting parameters without immediately resorting to expensive structural overbuild.
Why this matters
- According to the ScienceDirect abstract, the model achieved more than 90% utilization in both the cloud and edge layers while still serving as a useful planning instrument.
- The paper is positioned around precision agriculture, where real-time sensing quality directly affects downstream decisions.
- At the same time, the abstract notes that the framework is versatile enough to inform broader IoT scenarios that need efficient real-time analysis and resource management.
Publication record: Published in August 2025 in ICT Express, Volume 11, Issue 4, Pages 597-602 (DOI, ScienceDirect article).
May 19, 2025
Smart Building Surveillance with Edge-Fog Capacity Planning
Another recent publication appeared in the SBRC 2025 proceedings and focuses on intelligent camera surveillance in smart buildings. The core challenge is straightforward but operationally demanding: real-time video analytics requires significant compute resources, and poorly planned edge-fog pipelines can quickly become overloaded, slow, or wasteful.

What the paper contributes
- Uses Stochastic Petri Net (SPN) models to evaluate mean response time, throughput, resource utilization, and drop probability in intelligent surveillance infrastructures.
- Shows how edge and fog resource allocation decisions influence service quality under different message arrival rates.
- Offers planning guidance for scaling video analytics infrastructure in a controlled and explainable way.
Why this matters
- Crossref metadata for the paper reports that increasing the Fog layer to 10 processing cores reduces drop probability to around 35% at an arrival rate of 47.37 msg/ms.
- The same abstract reports that mean response time stays below 10 ms at moderate arrival rates up to about 29 msg/ms.
- The official SBRC 2025 proceedings page notes that 74 full papers were accepted from 203 submissions, corresponding to a 36.5% acceptance rate, underlining the competitiveness of the venue.
Publication record: Published on May 19, 2025 in the Anais do XLIII Simposio Brasileiro de Redes de Computadores e Sistemas Distribuidos (SBRC 2025) (DOI, proceedings article, SBRC 2025 proceedings).
April 2, 2025
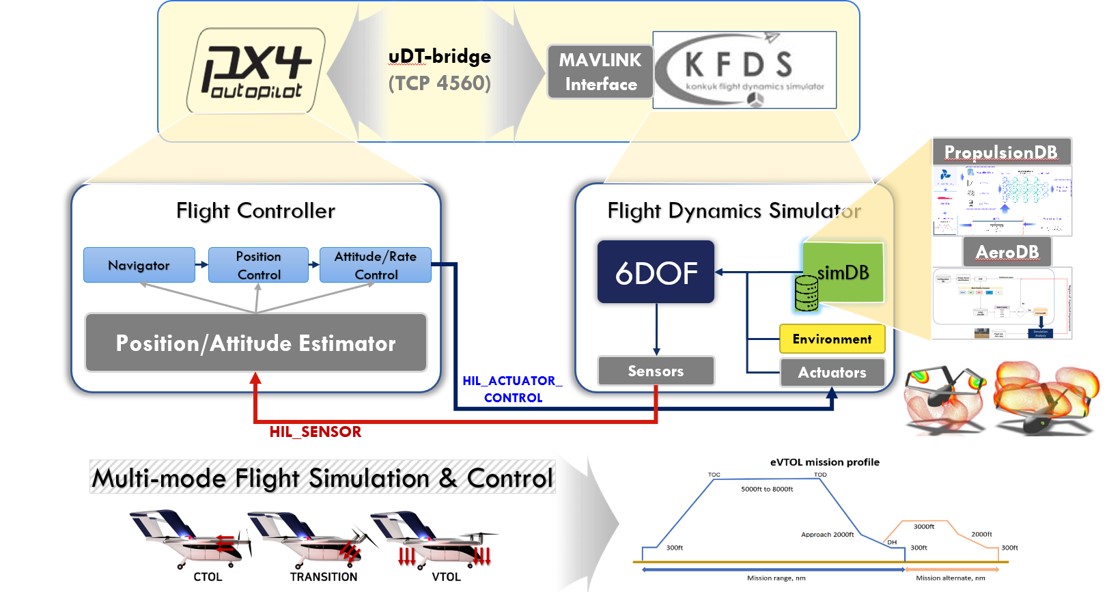
Vehicle Digital Twin Integration under Steady Wind Conditions
This proceedings paper from the Korean Society for Aeronautical and Space Sciences focuses on a vehicle digital twin as an integrated engineering system rather than a visualization layer. The study reports preliminary flight-simulation behavior for an eVTOL platform under steady-wind conditions, linking digital-twin design to actual flight-dynamics response.

What the paper contributes
- Integrates the subsystems of a vehicle digital twin and reports preliminary flight-simulation results.
- Studies the KADA KP2-c eVTOL in CTOL mode under light (10 knots) and moderate (20 knots) steady wind.
- Tracks how yaw-rate response changes under wind loading as part of the twin’s dynamic behavior.
Why this matters
- The official KSAS proceedings state that yaw-rate response varies significantly between 2.5 and 1.5 rad/s under the tested wind conditions.
- The same proceedings record positions the twin around high-fidelity dynamics and control response rather than immersive visualization alone.
- This makes the study a solid engineering step toward validating flight-oriented twins with future flight-test data.
Publication record: Published on April 2, 2025 in the Proceedings of the Korean Society for Aeronautical & Space Sciences Spring Conference 2025, Pages 381-382 (KSAS proceedings, DBpia record).
March 13, 2025
Correction Notice for the Container Migration Study
This publication record marks the formal correction linked to the container migration article published earlier in 2025. While shorter than a research paper, it still matters because dependable scholarship also depends on maintaining an accurate and transparent publication trail.

What the record contributes
- Establishes the official correction entry connected to the original container migration article.
- Keeps the corrected version and the original publication record explicitly linked.
- Preserves downstream citation clarity and metadata consistency.
Why this matters
- The Springer correction record is part of the scholarly history of the article and should remain visible as such.
- Accurate change tracking is especially important for technical papers that may be reused in later comparative or modeling studies.
- This entry therefore supports the integrity of the broader research line, even though it is not a new experimental study by itself.
Publication record: Published on March 13, 2025 in Computing, Volume 107, Article 93 (DOI, original article).
February 5, 2025
Comparative Performance Modeling for Container Migration
Container migration is one of the key mechanisms that allows cloud and edge services to remain available while workloads move, fail over, or rebalance. This Computing article studies that problem systematically using stochastic Petri net models instead of relying only on ad hoc operational trial and error.

What the paper contributes
- Proposes two SPN models, one with an absorbing state and one without, to evaluate container migration performance.
- Compares Cold, PreCopy, PostCopy, and Hybrid migration strategies under realistic demand and capacity assumptions.
- Analyzes metrics including total migration time, migration rate, utilization, and discard probability, with additional sensitivity analysis for the Hybrid policy.
Why this matters
- The Springer abstract reports that the Cold strategy achieves lower total migration time under higher migration-arrival pressure.
- The same abstract reports that PostCopy produces the lowest discard probability in high-demand scenarios.
- The paper therefore offers operators a structured way to choose migration policy based on workload conditions rather than intuition alone.
Publication record: Published on February 5, 2025 in Computing, Volume 107, Article 64 (DOI, Springer article).
February 1, 2025
Transactional Dynamics in Hyperledger Fabric
We are pleased to highlight a new ICT Express publication on permissioned blockchain performance. The paper models transaction processing in Hyperledger Fabric using Stochastic Petri Nets, with the goal of helping administrators understand how configuration choices affect response time, throughput, and resource efficiency before deployment decisions become expensive.

What the paper contributes
- Develops an SPN-based transaction-flow model for permissioned Hyperledger Fabric environments.
- Uses sensitivity analysis to identify the configuration factors that most strongly affect mean response time and throughput.
- Validates the model against system behavior and provides a pre-deployment tool for more disciplined performance planning.
Why this matters
- The ScienceDirect abstract reports a 95% confidence interval for response-time analysis using the proposed model.
- Case studies show that block size can change throughput and response time by as much as 200%, making configuration discipline essential.
- This turns the paper into a practical operations guide for enterprise blockchain administrators rather than a purely theoretical analysis.
Publication record: Published in February 2025 in ICT Express, Volume 11, Issue 1, Pages 87-92 (DOI, ScienceDirect article).
February 1, 2025
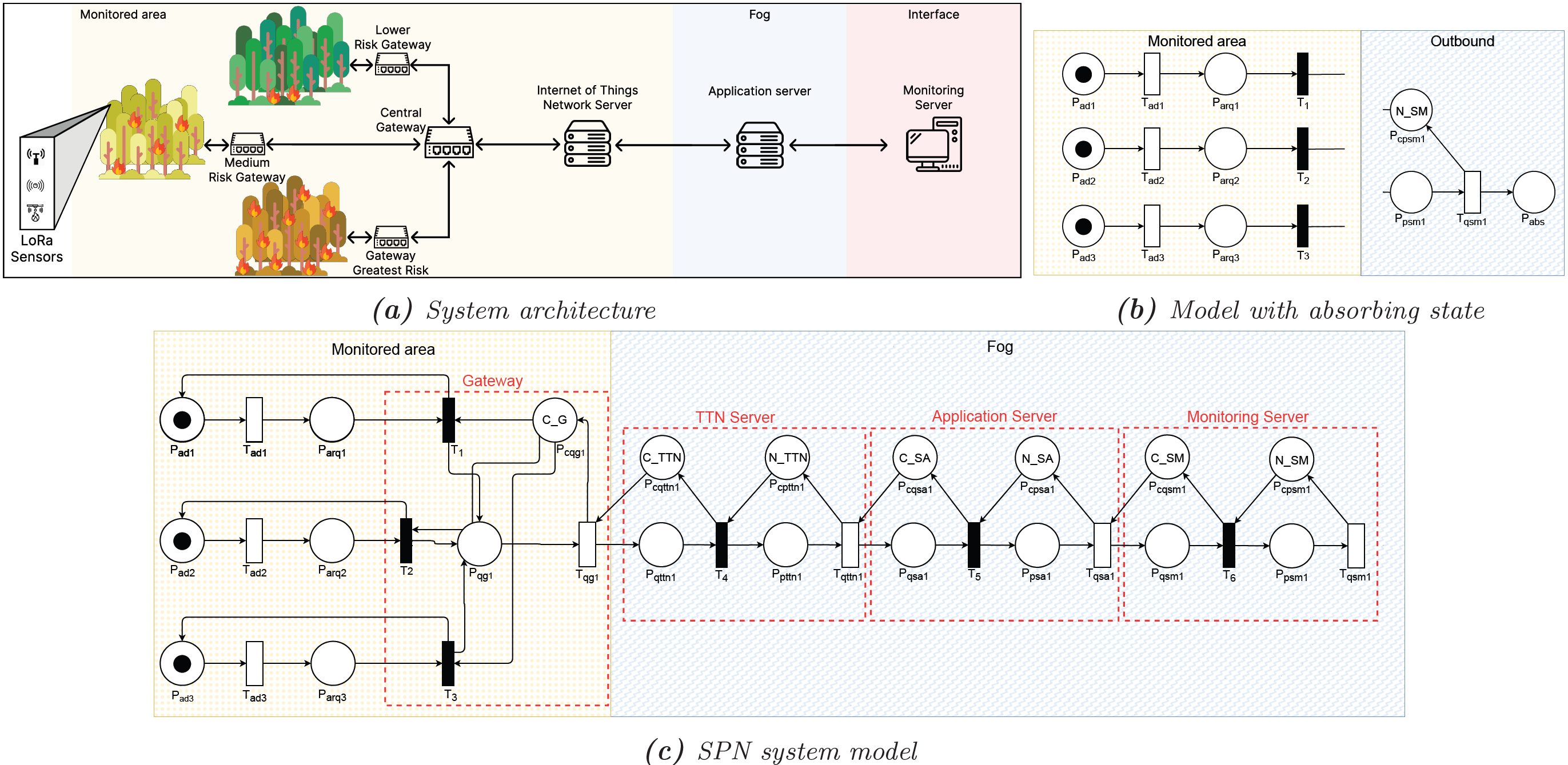
Multi-Region IoT Disaster Detection with Stochastic Modeling
This ICT Express publication studies disaster detection as a geographically distributed systems problem rather than a single-site sensing setup. By combining LoRaWAN-oriented communication assumptions with cloud and fog resources, the paper examines how multi-region monitoring can be modeled before infrastructure is deployed at scale.

What the paper contributes
- Presents stochastic models for IoT disaster detection across multiple geographic areas using LoRaWAN, fog, and cloud resources.
- Uses Stochastic Petri Nets to analyze key performance indicators such as average response time and utilization.
- Positions the models as a planning tool for cost-efficient server and processing-capacity design.
Why this matters
- The ScienceDirect highlights report that additional processing cores reduce mean response time and improve throughput.
- The abstract also frames the work around financial and technical barriers to building cost-effective automated systems in high-risk and secluded areas.
- This makes the paper directly relevant to resilient disaster-monitoring infrastructure, especially when coverage must extend beyond a single location.
Publication record: Published in February 2025 in ICT Express, Volume 11, Issue 1, Pages 34-40 (DOI, ScienceDirect article).
January 21, 2025
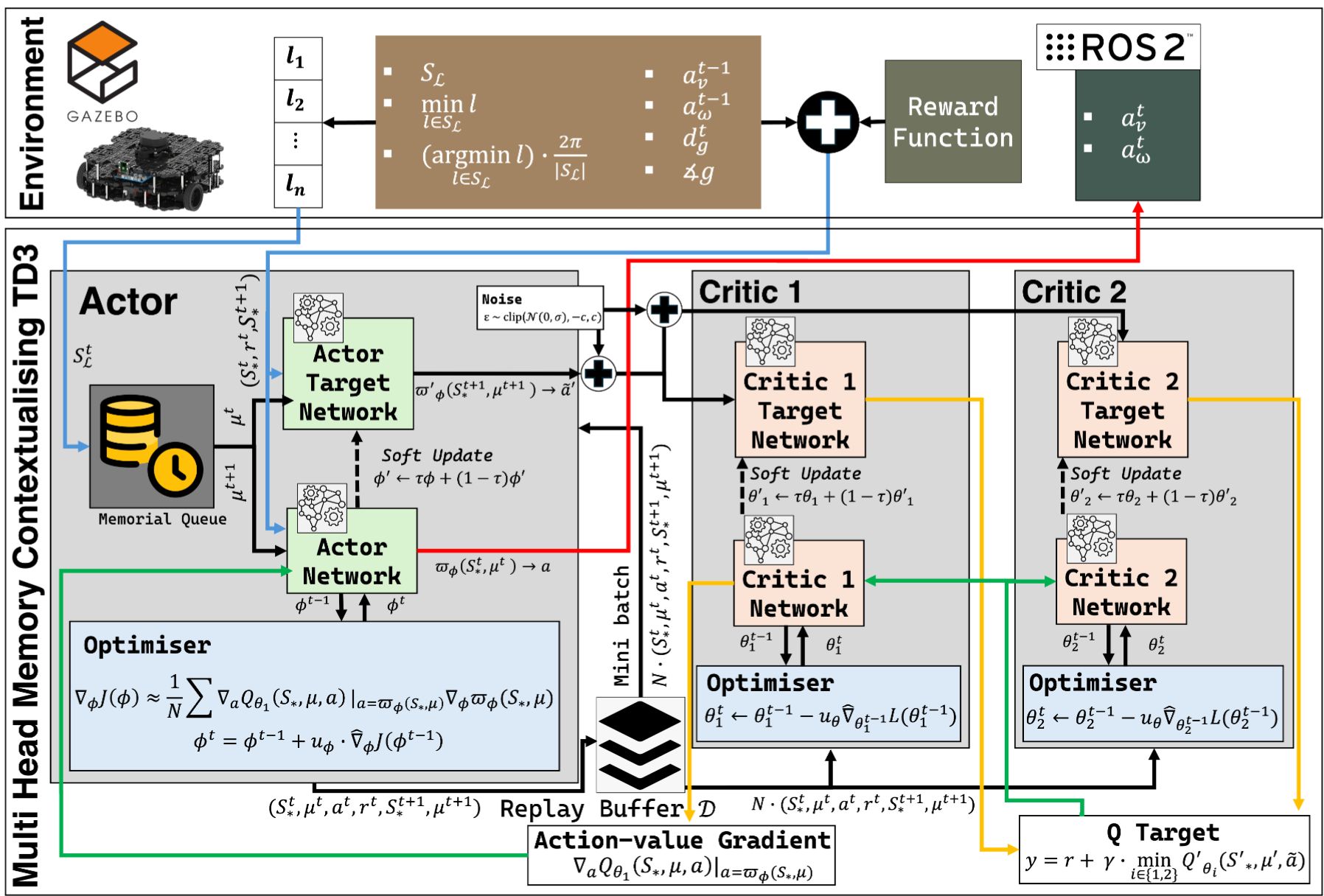
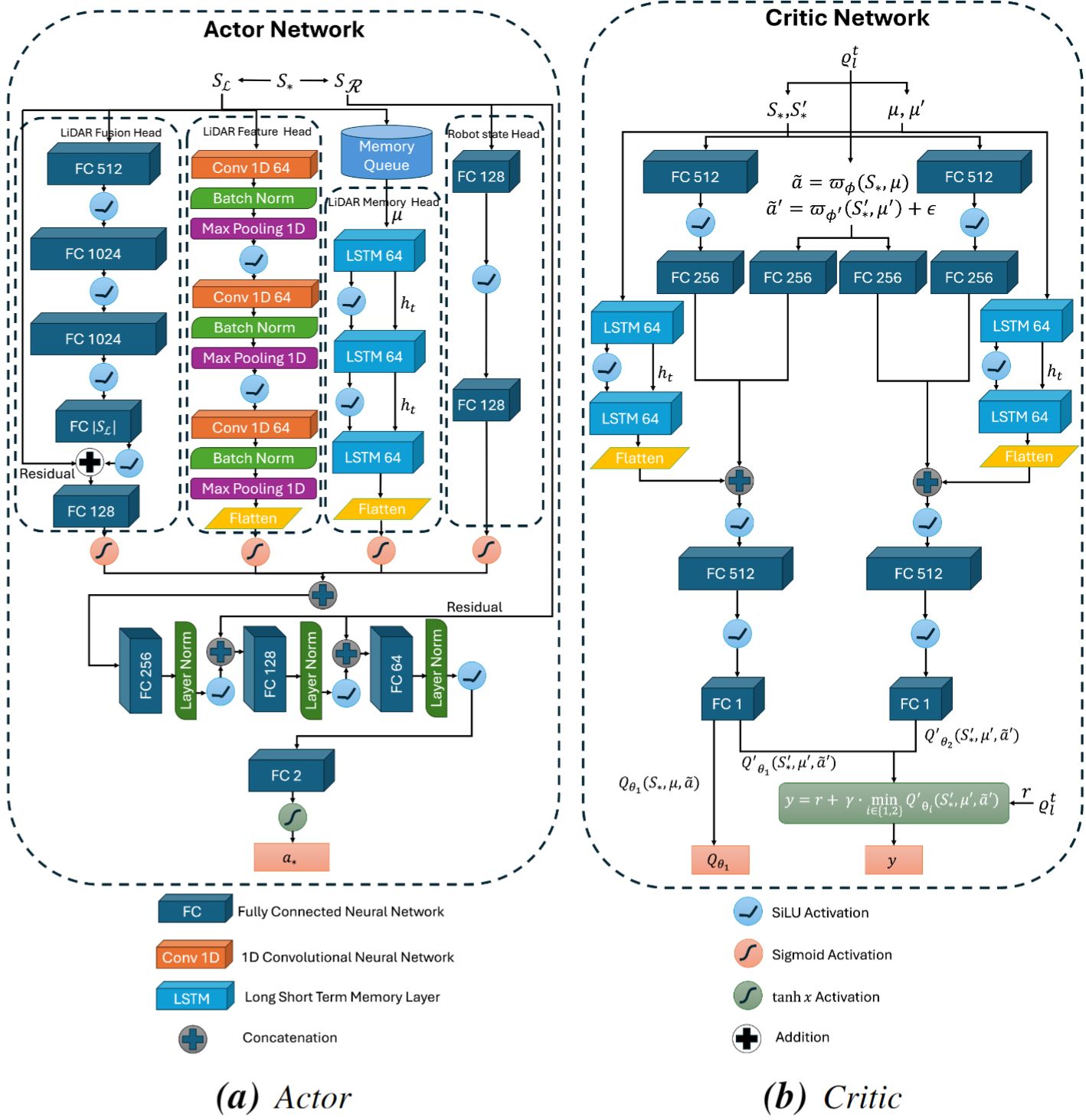
mhmcTD3: Multi-Head DRL with Memory for End-to-End Navigation
This TechRxiv preprint presents mhmcTD3, a multi-head actor-critic reinforcement learning architecture for autonomous navigation in dynamic and cluttered environments. The work is especially compelling because it aims to preserve rich LiDAR information, temporal context, and real-world transferability at the same time instead of optimizing only one of those dimensions.

What the paper contributes
- Introduces the Multi-Head Memory Contextualising TD3 (mhmcTD3) architecture with specialized heads for LiDAR fusion, LiDAR features, robot states, and LiDAR memory.
- Combines tailored LiDAR preprocessing, CNN-based feature extraction, an LSTM-based memory head, and the use of SiLU and CoRE for more stable learning.
- Evaluates the framework in ROS2/Gazebo simulation and on a Turtlebot3 waffle pi platform across multiple LiDAR resolutions.
Why this matters
- The official TechRxiv PDF reports strong performance in dense and fast-changing environments, including better handling of small dynamic obstacles.
- The same preprint emphasizes that ablation studies confirm the importance of each head, showing that the architecture is not just larger, but meaningfully modular.
- This makes mhmcTD3 a strong sim-to-real navigation contribution for robotics settings where map-free adaptability matters.
Publication record: Posted on January 21, 2025 on TechRxiv (DOI).
December 21, 2024
mhmcTD3: A Multi-Head DRL Architecture for Autonomous Navigation
Our latest research presents mhmcTD3, a novel multi-head, memory-enhanced DRL architecture that integrates advanced LiDAR preprocessing with CNN and LSTM modules. This combination ensures:
Enhanced detection and avoidance of small, moving obstacles.
Improved stability and learning efficiency through SiLU activation and CoRE optimization.
Smooth adaptation across various LiDAR resolutions, validated in both simulated (ROS2, Gazebo) and real-world (Turtlebot3) tests.
The result is a more adaptive, responsive, and reliable autonomous navigation solution ready to meet the complexities of dynamic environments.
September 14, 2024
Enhancing IoT Disaster Detection Systems with Stochastic Models Across Multiple Geographic Areas
We are pleased to introduce our latest research published in ICT Express (SCIE, JCR.Q1.CS.IS., Ranking 58/249, IF2023=4.1). This study presents advanced Stochastic Petri Net (SPN) models to optimize IoT sensor operations in LoRaWAN networks, addressing key challenges in large-scale, disaster-prone regions.
Key Highlights
- Introduced two SPN models to simulate and enhance IoT sensor performance, focusing on crucial metrics like Mean Response Time (MRT) and Drop Probability (DP).
- Conducted a detailed sensitivity analysis to identify essential factors affecting system efficiency, including fog computing resources and server capacities.
- Demonstrated that strategic optimization of fog computing and server resources significantly boosts system responsiveness and reliability.
Impact: This research offers a robust framework for designing resilient, cost-effective disaster management systems. It provides actionable insights for the future of disaster detection and smart city infrastructure.
Discover how IoT and fog computing can strengthen disaster response in the full paper.
Citation:
Araújo, I., Silva, L. G., Brito, C., Min, D., Lee, J.-W., Nguyen, T. A., Leão, E., & Silva, F. A. (2024). DDS-P: Stochastic models based performance of IoT disaster detection systems across multiple geographic areas. ICT Express, doi: 10.1016/j.icte.2024.09.005
August 28, 2024
Efficient UAV Flights and Operational Performance in Delivery Services
We recently highlighted the study “Efficient Strategies for Unmanned Aerial Vehicle Flights: Analyzing Battery Life and Operational Performance in Delivery Services using Stochastic Models” published in IEEE Access. This research, conducted by Francisco Airton Silva, Vandirleya Barbosa, Luiz Nelson Lima, Arthur Sabino, Paulo Rego, Luiz F. Bittencourt, Jae-Woo Lee, Dugki Min, and Tuan Anh Nguyen, advances what is possible in UAV delivery services.
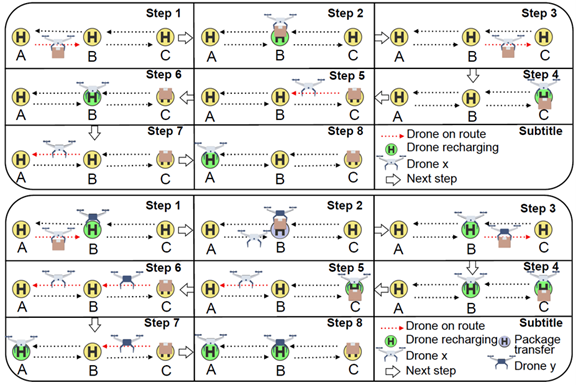
Overview
We introduced two advanced models to evaluate and boost drone delivery efficiency. Whether it’s solo drone missions or cooperative ones (where drones hand off packages to each other), these models are helping us understand how to make drone deliveries faster, more reliable, and way more efficient!
Why It Matters
- Strategic Charging: The study shows that where we place charging stations can make or break the delivery times. Think faster deliveries, fewer delays!
- Cooperation is Key: Drones working together are more effective, especially in busy urban areas. More drones, less hassle!
- Optimized Operations: The research highlights the importance of careful planning - from the number of drones to how long they charge - to maximize efficiency.
Why this matters for practice
This research sets the stage for a new era in logistics, where drone deliveries are not just a concept but a highly optimized, efficient reality.
Curious about the details? Dive into the full study in IEEE Access and see how these strategies can revolutionize our delivery services!
July 29, 2024
SHANGUS: Redefining Autonomous Exploration with Deep Reinforcement Learning
I am pleased to share some exciting advancements in our research and development at the Distributed Multimedia Systems Laboratory (DMS). Our team has been working diligently on SHANGUS, an innovative framework that integrates Deep Reinforcement Learning (DRL) with heuristic optimization to improve autonomous exploration in unknown environments.
Key Highlights
Integration of DRL and heuristic optimization: SHANGUS combines the adaptability of DRL with heuristic prioritization to enhance exploration efficiency, reduce completion time, and minimize travel distance.
Advanced frontier selection and navigation strategy: Our approach features a frontier selection node and a DRL navigation node using the TD3 algorithm, ensuring robust path planning and dynamic obstacle avoidance.
Superior performance in simulations: Through extensive experiments in ROS2 and Gazebo environments, SHANGUS has shown promising results, outperforming traditional methods like Nearest Frontier (NF), CFE, and GDAE, particularly in complex scenarios.
Watch Our Demos
- Simple World: Watch the demo
- Moderate Complex World: Watch the demo
- Most Complex World: Watch the demo
For those interested in a deeper dive into our research, you can read our full paper, published as a preprint on arXiv: SHANGUS: Deep Reinforcement Learning Meets Heuristic Optimization.
We hope to receive feedback and contributions from friends and colleagues to further extend our research and enhance the quality of our paper.
We are excited about these developments and their potential applications in industrial automation, autonomous driving, household robotics, and space exploration. Thank you for your continued support and interest in our work at DMS Lab!
July 20, 2024
Pilot-in-the-loop simulation with virtual reality (PILS-VR) running on top of cloud-in-the-loop simulation (CILS)
I am excited to share the progress our team has made in a short period. It was an honor to represent our group at the Conference on Automation, Control, and Robotics Engineering (CACRE 2024) in Jeju. Our collaboration with Korean students, combined with the relentless efforts of our Vietnamese team at KADA, has led to remarkable developments.
In a short time, we have successfully expanded our Pilot-in-the-Loop Simulation (PILS) system by integrating it with Virtual Reality (VR) on the Cloud-in-the-Loop Simulation (CILS) platform. A special thanks to my colleagues: Dr. Vinh Vinh Phạm, Nghĩa, and Nguyễn Viết Nghĩa. Please excuse the rudimentary graphics as our focus wasn’t on 3D development.
PILS-VR System Overview
In this video, we showcase our innovative system developed at the Konkuk Aerospace Design Airworthiness Institute (KADA). We’ve successfully integrated PILS with our Cloud-in-the-Loop Simulation (CILS) system, built on the KP-2 platform for Future Advanced Air Mobility (AAM).
Highlights of PILS-VR:
- Realistic VR Training: Experience a highly immersive training environment that simulates real-world flight conditions and emergency scenarios.
- Cloud-Based Flexibility: Seamless integration with CILS enables remote access, real-time data analysis, and collaborative training, enhancing flexibility and efficiency.
- Cost-Effective Solutions: Reduce traditional training costs and increase accessibility with our advanced VR and cloud technologies.
- Personalized Feedback: Benefit from detailed performance tracking and tailored feedback to accelerate learning and improve skills.
Join us to see how PILS-VR is revolutionizing pilot training and setting new standards in aviation safety.
Data Exchange Method Development
Using this method, we can input control signal data from pre-existing files into KFDS, which then loads these control data according to the predetermined times specified in the files. Subsequently, the flight state data generated by KFDS are recorded for validation or virtual certification purposes.
(p/d) Twin Data Center
Watch our video on Twin Data Center
All data from KFDS and PX4 are collected in run-time simulation for further analysis and prediction for future updates of digital twin models in the virtual world.
July 20, 2024
2024 9th International Conference on Automation, Control and Robotics Engineering (CACRE 2024)
I am thrilled to share that I had the incredible opportunity to attend and present at the 2024 International Conference on Automation, Control, and Robotics Engineering (CACRE 2024) held on Jeju Island, South Korea, from July 18-20, 2024. This prestigious conference brought together leading experts, researchers, and practitioners in the fields of automation, control, and robotics from around the world.
As part of the conference, I presented our latest research from the Konkuk Aerospace Design-Airworthiness Institute (KADA). Our study, titled “AAM-VDT: Vehicle Digital Twin for Tele-Operations in Advanced Air Mobility,” delves into the innovative use of digital twin technology for enhancing tele-operations in the realm of advanced air mobility.
I am honored to share that our presentation received the Excellent Oral Presentation award in the Special Session IX: Modeling, Control, and AI for Autonomous Vehicles. This session was chaired by Sungjin Cho from Sunchon National University, South Korea, with Sangho Kim from Konkuk University, South Korea, serving as Vice Session Chair.
I am incredibly grateful to my professor and co-author, Professor Jae-Woo Lee, the Director of KADA, and all the contributors for their hard work and dedication to this project. A special thank you to the conference organizers and attendees for providing such a fantastic platform to share our work and engage with the global community.
Looking forward to the future collaborations and advancements in this exciting field!


May 14, 2024
Advanced Air Mobility-Vehicle Digital Twin (AAM-VDT)
Excited to share our achievements after a year of leading the AAM-VDT project at Konkuk Aerospace Design-Airworthiness Institute (KADA). We’ve made significant progress in developing an integrated simulation platform for the Konkuk Passenger Vehicle (KP-2) digital twin in the Advanced Air Mobility (AAM) sector. Our focus on cutting-edge technologies has paved the way for a revolutionary system in urban air mobility.
The Advanced Air Mobility-Vehicle Digital Twin (AAM-VDT) project integrates cloud computing, artificial intelligence, and simulation to manage heterogeneous vehicles in real-time. Our collaboration within the KADA Research Groups - Design and Analysis, Simulation and Control, and AI Applications - has been instrumental in achieving our goals.
Our key features include cloud server integration, AI-driven operations, digital twin technology, and a strong emphasis on operational safety and management. By utilizing digital twin dynamics, ensuring safety and reliability, and implementing multi-vehicle coordination, we are shaping the future of AAM operations.
Media
- VDT Simulation System
- VDT Concept Illustration
- VDT Simulation in KU Map (01)
- VDT Simulation in KU Map (02)
- VDT Simulation in Seoul Map (Fixed Wing)
- VDT Simulation Scenarios
- KP2C Real Flight Test
- KP2C es-DNLC Flight Test
- KP2C LQR Flight Test
Special thanks to our diligent KADA engineers and researchers! Jeongseok Hyun, Minseok Jang, Taeho Kwag, Nghia Nguyen, Vinh Pham, AYE AYE MAW
Excited about the possibilities that lie ahead as we continue to innovate and drive advancements in advanced air mobility.

May 10, 2024
IEEE/IFIP Network Operations and Management Symposium (NOMS 2024) - 6-10 May 2024 // Seoul, South Korea
I am excited to announce my attendance at the 2024 IEEE/IFIP Network Operations and Management Symposium (NOMS 2024), which took place from May 6 to May 10, 2024, at The-K Hotel in Seoul, South Korea. Returning to Korea after two decades, this symposium was a pivotal event for professionals in the network operations and management field. NOMS 2024 featured an extensive program with keynotes, technical sessions, panel discussions, and various workshops. The theme for this year was “Towards intelligent, reliable, and sustainable network and service management,” focusing on the latest advancements in 5G and emerging 6G networks and their roles in supporting critical applications such as IoT, smart cities, and autonomous vehicles. This event gathered researchers, developers, service providers, and policymakers, offering a unique platform for knowledge exchange and collaboration in shaping the future of network management.
At NOMS 2024, we presented our paper titled “Optimal Resource Utilization in Hyperledger Fabric: A Comprehensive SPN-Based Performance Evaluation Paradigm,” authored by Carlos Melo, Glauber Gonçalves, Francisco A. Silva, Leonel Feitosa, Iure Fé, André Soares, Eunmi Choi, Tuan Anh Nguyen, and Dugki Min. Our research focuses on Hyperledger Fabric, a leading framework for permissioned blockchain systems, and aims to enhance blockchain performance and efficiency. Key points of our presentation include:
- Development of a Stochastic Petri Net (SPN) Model: We created an SPN model to evaluate Hyperledger Fabric’s performance under various configurations.
- Detailed Transaction Phase Analysis: Our model offers in-depth analyses of the endorsement, ordering, and commit phases of transactions.
- Actionable Insights for Optimization: The model provides administrators with practical insights for optimizing blockchain configurations.
- Support from Case Studies and Sensitivity Analysis: We included practical case studies and a sensitivity analysis identifying critical factors affecting mean response time (MRT).
- Impact of Configuration Parameters: Our findings highlight the significant impact of block size and transaction arrival rates on system response times.
- Real-World Application Validation: The model’s utility was validated through real-world applications, demonstrating its effectiveness in optimizing resource utilization and transaction throughput.
This research provides a robust framework for pre-deployment performance evaluation and capacity planning in Hyperledger Fabric, paving the way for more efficient and scalable blockchain implementations in enterprise environments.
Special thanks to our Brazilian team, coordinated by Francisco Airton Silva, Laboratory of Applied Research to Distributed Systems (PASID), Federal University of Piauí (UFPI) (campus Picos), Teresina, Piauí, Brazil, for their collaboration in the research.
During the conference, I had the pleasure of meeting Jin-Hee Cho, a collaborator of my Ph.D. supervisor, Dongseong Kim. Jin-Hee Cho is now an Associate Professor in the Department of Computer Science at Virginia Tech. It was great to converse with her and attend her fascinating research presentation. It’s remarkable how small and interconnected the world can be.
.jpg)
.jpg)
.jpg)